基于TMS320C64x 的MPEG-4實時編碼器設計與實現

首先主機通過PCI初始化DSP并對其加載程序;DSP開始運行MPEG-4編碼程序,從視頻端口獲取實時采集的視頻,如圖1所示。SAA7113輸出BT.656格式的數字視頻,作為DM642 VPORT的輸入,VPORT輸出YUV(4:2:0)格式的圖像,作為編碼程序的輸入;DSP完成一幀圖像的編碼,通過PCI向主機發出中斷;主機響應中斷,從DSP的存儲空間讀取原始圖像數據和壓縮后的碼流。主機程序在VC++環境下編寫,提供與用戶交互的界面,可對數據進行各種處理,包括原始視頻的實時播放、保存,壓縮碼流的實時解壓播放、保存、回放、網絡傳輸,從網絡接收壓縮碼流實時解壓回放等。
需要注意的是原始圖像和壓縮碼流在DSP中的存儲。視頻端口、編碼程序和主機都要訪問原始圖像,例如在某一時刻,編碼程序訪問當前幀圖像,主機讀取上一幀圖像,而視頻端口正在輸入下一幀圖像,為了避免訪問沖突,原始圖像在DSP中采用三緩沖區進行管理。壓縮碼流由編碼程序寫入,主機讀取,所以采用乒乓制進行存儲。
1.3 內存分配
DM642片內只有256KB的存儲空間,因此當前幀、參考幀和當前幀的重建幀都必須放至片外存儲器,壓縮碼流若被主機讀取,也放至片外。其它數據如程序代碼、全局變量、VLC碼表、各編碼模塊產生的中間數據等均可放至片內。
由于CPU訪問片外的速度通常要比訪問片內慢幾十倍,片外數據的傳輸通常成為程序運行時的瓶頸,即使代碼效率很高,流水線也會因為等待數據而被嚴重阻塞。解決這一問題的有效方法是用EDMA傳送數據。程序是逐個宏塊進行編碼的,在編碼當前宏塊的同時,EDMA將下一個宏塊的數據、用到的參考幀數據由片外傳送至片內;當前宏塊做完運動補償后,EDMA將重建后的宏塊由片內傳送至片外。這樣CPU只對片內數據進行操作,使得流水線可以順利進行,而壓縮碼流按逐個碼字有時間間隔地寫入,可由CPU直接寫至片外。
2 采用預測技術的運動估計算法
運動估計是MPEG-4編碼中計算量最大的一部分,占據整個編碼時間的50%以上。各種快速運動估計算法也成為近年來研究的熱點。本文通過實驗證明,采用預測技術的運動估計不但可以大大縮短計算時間,而且也有助于提高圖像的質量。
宏塊(Macro Block)的運動矢量(Motion Vector)在時間和空間都具有相關性,預測的原理就是利用當前幀和參考幀內相鄰位置宏塊的MV來預測當前宏塊的MV。下面詳述本文所采用的預測算法。
(1)確定當前宏塊MV的7個候選值PreMV1~7。
如圖3所示。PreMV1=(0,0);PreMV4取當前宏塊左邊相鄰宏塊的MV值;PreMV5取上邊相鄰宏塊的MV值;PreMV6取右上方相鄰宏塊的MV值;PreMV2=mid{PreMV4, PreMV5, PreMV6},即取三者的中值;PreMV3取參考幀相同位置宏塊的MV值;PreMV7取參考幀右下方相鄰宏塊的MV值。
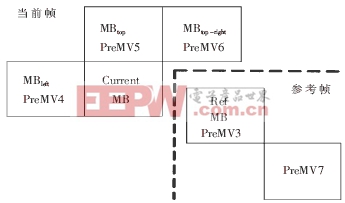
圖3 預測運動矢量示意圖
(2)確定篩選候選值的依據——SAD(絕對誤差和)的門限值ThreshSAD。
SAD是確定最佳匹配塊的準則。門限值ThreshSAD是指這樣一個值:如果參考幀內某一宏塊和當前宏塊的SAD小于ThreshSAD,則當前宏塊的MV值就可取作二者之間的位移。因此,ThreshSAD就可作為篩選7個候選值的依據。
由于SAD在空間上的相關性,ThreshSAD由相鄰宏塊的SAD值來確定:
ThreshSAD=Min{SADleft,SADtop,SADtop_left}
其中,SADleft、SADtop、SADtop-right分別為MBleft、MBtop、MBtop-right和其對應匹配塊的SAD值,ThreshSAD取三者的最小值。
(3)從7個候選值中選出當前宏塊的MV值。
按照PreMV1~7的順序,依次計算當前宏塊和7個匹配塊的SAD值。如果有SAD值小于ThreshSAD,即停止計算,選用對應的PreMV作為當前宏塊的MV值;如果7個SAD值均大于ThreshSAD,則采用運動搜索來確定當前宏塊的MV值。該運動搜索并不以MV=(0,0)為中心,而是以對應SAD值最小的PreMV為中心,搜索采用簡化的菱形算法。
對標準視頻序列foreman.cif(352×288)進行編碼(碼率300kbps),測得表1所示數據。采用預測的運動估計算法利用視頻序列在時間和空間上的相關性,無需對每個宏塊都進行運動搜索,而且其搜索中心點也同樣利用了相關信息,搜索算法也可進一步簡化,因此大大減少了運動估計的計算量;同時,預測有助于提高圖像質量,直接進行快速運動搜索通常會帶來局部最小的問題,從而影響圖像質量,而PreMV1~7取自位于當前宏塊周圍各個方向的宏塊的MV值,避免陷入局部最小。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理
評論