基于CAN總線的監控系統智能節點設計

(2)數據采集模塊:將傳感器采集到的模擬信號轉變為數字信號并通過多路模擬開關送入微控制器,CPU得到電機定子溫度、電流、液位信息做出相應的判斷,并送至不同的子程序進行相應的處理。
(3)電機控制模塊:CPU判斷電機定子溫度、電流、液位中的任一項值超出正常值范圍時,都會通過SSR(過零觸發型交流固態繼電器)觸發相應的異常處理電路,使電機得到保護。
(4)LED顯示模塊:采用基于I2C總線的顯示技術,通過LED數碼管實時顯示電機運行過程中定子的溫度和電流值。并可以在設置模式下顯示待定置參數的當前值。當電機出現非正常停機時發光二極管可以指示出故障的類型,方便檢查處理。
(5)CAN通信模塊:CAN總線通信接口電路主要由P87C591的片內CAN驅動器SJA1000、6N137高速光隔、CAN收發器PCA82C250組成。P87C591完成CAN協議的應用層功能,SJA1000完成物理層和數據鏈路層的功能。PCA82C250提供了對總線差動發送和接受數據的功能,有效的提高了總線的抗干擾能力,實現了保護總線、降低射頻干擾等功能。6N137隔離控制電路和收發器電路,能夠有效地抑制由總線引入的干擾,進一步提高了系統的可靠性。
(6)現場設置模塊:采用基于8255的鍵盤和基于X25045的E2PROM,實現節點工作參數現場設定能。X25045存儲報警電流、停機電流、報警溫度、停機溫度、節點地址、波特率等信息。這些參數都可以通過按鍵進行設置。除了節點地址外,其它的參數也可以通過監控計算機設置。
4監控節點的軟件設計
4.1軟件設計的總體結構
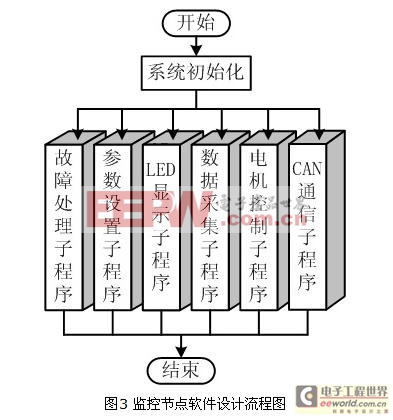
與節點硬件設計相一致,軟件設計也遵循模塊化的設計原則,使控制軟件具有易讀、易擴展和易維護的優點。通過C51語言編寫相應的軟件模塊實現上述監控節點的各種功能。軟件的各功能模塊之間通過入口和出口參數相互聯系,組合靈活且方便,減少了調試時間,縮短了開發周期。監控節點的軟件設計流程如圖3所示。
4.2監控節點通信程序設計
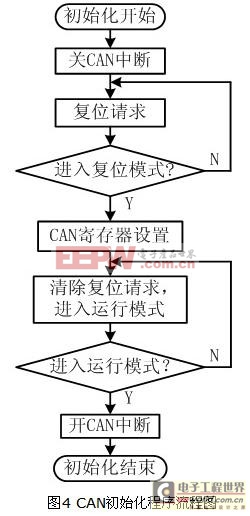
監控節點的通信采用CAN總線2.0A協議,通信模塊的軟件設計主要由初始化程序、發送程序、接收程序三部分組成。其中初始化程序是實現通信的關鍵,它主要用來完成CAN控制器工作方式的選擇,即對P87C591中CAN控制器控制段中的寄存器進行設置,包括:總線定時寄存器和輸出控制寄存器設置;接收驗收濾波寄存器和濾波屏蔽寄存器設置;設置發送數據幀類型(標準幀或擴展幀)、標識符、數據長度。初始化過程是在CAN控制器復位模式下完成的,監控節點通信的初始化程序流程如圖4所示。
監控節點與CAN總線之間的數據交換是通過發送程序和接收程序實現的。發送程序流程如圖5所示,從圖5中可以看出系統的每個節點采用定時中斷的方式主動向監控計算機發送數據。這是利用了CAN總線可以采用多主機方式通信的特點。由于實時監控功能是由各個控制節點完成,而監控計算機主要用來實現管理功能,所以采用了定時上傳數據的方法,而沒有實時上傳所有傳感器采集到的數據,從而減輕了總線負擔。這也是分布式控制方法相對于集中控制方法的一個優點。圖6為接收程序流程圖,接收緩沖區用來存放CAN總線上發來的數據,CPU讀取數據后接收緩沖區將被清空,等待接收新的數據。










評論