汽車電子系統發展和實用化的三大技術

采用傳統的線束方案將使得連線的長度和數量大大增加,而不斷加長的線束和增多的插接器增加了汽車質量,削弱了性能,使得可靠性很難保證。一輛正常行駛的車輛,線束每超過50g 或能量損耗每超過100W,百公里油耗將增加0.2L。而且,繁雜的線束插接器使得電壓大幅下降,限制了其他功能的正常使用,成為汽車電子系統中最昂貴、最繁瑣的的一部分。
車載網絡系統就是將電器元件連接在汽車控制網上,如同計算機連接在局域網上一樣。這些網絡都可以方便地進行信息和資源共享,從而成功的解決了上述技術難題,這也是現代計算機網絡技術和汽車電子技術成功結合的一個典型范例。目前,車載網絡系統已開始在全世界范圍內得到廣泛的應用。而在汽車中應用最廣泛的網絡協議標準就是CAN(Controller Area Network)網。
20 世紀80 年代中期,Bosch 公司開發出了這種控制局域網,這是最早的、使用時間最長的汽車控制網絡。CAN 網已在當前的汽車上廣泛應用。僅2000 年其相關器件的銷量就超過的1 億個。
一臺典型安裝有CAN 網的車輛能同時容納2~3 個獨立的運行在不同傳輸速率下的CAN 網,低速CAN網運行在125 Kbps 下,通常負責管理“舒適性功能”,如:電動座椅,電動玻璃升降等。一般情況下,沒有實時要求的控制采用低速網。它有能量存儲-睡眠模式,在此模式下,節點停止振蕩直到一個CAN 網信息喚醒它。睡眠模式可防止電量消耗。
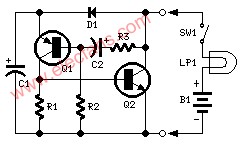
高速CAN 網用于滿足實時性高的重要控制。如:發動機管理、ABS、巡航。盡管高速CAN 網最大波特率可達到1Mbps,但是CAN 網高速運行時雙絞線電纜中產生很大的電磁輻射,當傳輸速率超過500kbps后,其能量的損失會迅速增大。所以一般高速網為500kbps。圖2 給出了一個典型的雙速CAN 網的模型。

圖2 一個典型的CAN 網模型
隨著汽車上電子系統的迅速增多,他們將消耗大量的電能,使得總負荷即將超過2kW。內部能量需求將以每年4%的速度遞增,如果這種趨勢持續下去,那么,保守一點估計,到2005 年,高級汽車的平均電能需求將達到2.5kW。這種增長將使目前的供電系統顯得力不從心。例如:在3kW 負荷下,帶托架和皮帶傳動的發電機會發出明顯的噪聲,并且需要附加額外的冷卻裝置。
表1 指出了一些重要系統可能消耗的電能負荷。汽車專家們預計在2005 年的電器負荷水平會達到表中的指定值。
表1 汽車主要電器系統負載預計 
采用42V 的電器系統需要一個36V 蓄電池,最大工作電壓50V, 峰值電壓可達58V。這是因為60V 是工程師們認為的最大安全界限。更高的電壓將產生危害。
盡管42V 系統的優點顯而易見,但從沿用了半個世紀的12V 系統轉換成42V 系統,產品的重新設計和制造的費用極大,維護和升級將帶來障礙。因此,目前比較現實的是采用一種14V/42V 的雙電壓方案,以減小對汽車零部件制造業的沖擊,實現平穩過渡。
14V/42V 雙電壓的變換過程如下:交流發電機輸出42V 高電壓,借助一個DC/DC 變換器(直流變換器),由42V 變換14V。在這個系統中,DC/DC 變換器將供電系統分隔為兩個具有不同電壓等級的供電系統,除降壓外,還在整個電氣系統的電能分配管理中起到重要作用。
5 結束語
通過對以上三種汽車電子發展和實用化技術的分析,大家不難看出,他們之間有著十分明顯的因果關系。為了滿足人們對汽車性能的新要求,必須廣泛采用X-by-wire 技術實現電控化,而X-by-wire 技術的發展又使得線束系統過于復雜化而不堪重負,車載網絡系統的發展則成功的解決了這一技術難題。同時采用42V 能量方案又保障了前兩者的能量供應,并為其發展提供了更廣泛的空間和保證。這三者相輔相成、互相促進的共同發展,必將使汽車電子技術水平邁上一個新的臺階。可以預見,在最近幾年,我國與國際同步推出的新車型里,我們將會經常看到成功應用這些技術的例子。
參考文獻
1 Gabriel Leen, Donal Heffernan “Expanding Automotive Electronic systems” IN VEHICLE NETWORKS 0018-91621021 January 2002
2 吳玉生,劉曙生,陳大恒. CAN 網絡應用軟件的設計. 微機算計信息2002 (2)
3 鄔寬明. CAN 總線原理和應用系統設計. 第一版. 北京航空航天大學出版社, 1996(end)





評論