絕對位置測量系統的高速接口


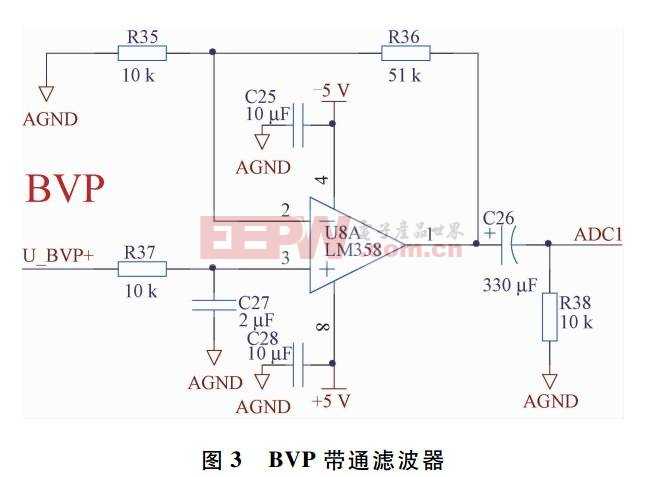
圖3:可通過后繼電路讀寫的存儲區作為一個選項,可以附加傳送幅值為1VPP 的正弦增量信號。電纜最長為150 米。連續數據傳送的最大時鐘頻率為2MHz。
自動的參數設置
編碼器參數包含反應編碼器的特定信息,如:編碼器類型(單轉、多轉、線性)、每轉測量步距或分辨率。現在,通常是人工通過控制面板或計算機手工輸入這些參數。當然,這種方法要耗費時間并容易導致錯誤。帶有Endat 接口的編碼通過編碼器制造商將編碼器所有參數存儲于一個單獨的存儲區。這樣,就可讀出參數和自動輸入參數。
通過維護及維修人員,編碼器可以存儲兩個單獨的字,每一個16 位,用來描述導致編碼器故障或長時間超出公差范圍的原因。這些字用來區別報警或警告。當出現可能導致編碼器輸出不正確位置值的故障時,產生報警。舉例來說,如果電源電壓太低、光源故障或掃描信號的振幅太低等都會產生報警。
警告僅在超出某些編碼器內部的公差極限值時顯示。包括最大的電氣允許速度、允許的操作溫度及來自于光源控制響應的終止等。
警告不需要顯示已經傳送的不正確的位置值。只是在必要時要做一些預防性的維護,因此減少了昂貴的系統的空閑時間。
安全監控的支持
為了減少成本,機床和系統制造商希望取消限位開關。為了系統的安全性,通常需要使用兩個位置編碼器。一些機床制造商希望僅使用一個可在靜止和相應的高速時都能提供“安全的”位置值的位置編碼器。多轉的絕對式編碼器即是實現這一要求的一個案例。基本設計原理是該編碼器上有一組刻線盤,其中一些刻度盤與機械齒輪組相連。掃描單獨的刻度盤便可以直接通過輸入選通門陣列獲得邏輯數字位置值。邏輯選通門避免了各齒輪級之間的不可消除的游隙。位置值通過線性驅動器傳輸到后續電子設備。在一連串的元件中任何一個發生故障均能監測出來。
通過一個多轉的絕對值編碼器的例子來說明如何實現。
可監控的功能可分為三組:
光源
選通門陣列輸入端觸發,選通門陣列和線行驅動器的輸出寄存器變化。
選通陣列
通過閉環控制監測光源,在允許的控制范圍內如果光源未保持則會產生出錯信息(圖 4)。對編碼器來說,為了監測選通門陣列的輸入端施密特觸發,選通門的輸出寄存器移位和線性驅動器,輸出信號端有一定變化的測試電壓施加于施密特觸發處。如果輸出信號的光電池信號源超出變化極限,系統會產生出錯信息。

圖4:絕對旋轉編碼器的安全方法由于絕對值旋轉編碼器最高轉速可達12000rpm,必須有快速的動態監控。在這樣的時間條件下,對于靜態的編碼器目前還不能滿足上述的反應速度。 然而,這種功能還是可以實現的:通過冗余監控檢測在高速時通過串行接口傳送的絕對位置值、單獨的正弦增量信號及動態的代碼是否一致。如果掃描信號的位置超出了規定的公差帶,動態代碼將輸出一個錯誤信息。
公差受齒輪運動及通過光電池放大的相位角度差影響。由于這些偏差,絕對位置值將不能達到± 1 LSB(最小有效位)的精度。
為了在高轉速下接收正確的絕對位置信息,編碼器除絕對位置值外還向后繼電路傳送相序相差90°的兩組增量信號。絕對位置值與增量位置值在其分別定義的“精度范圍”內必須一致(如1500rpm 為± 1 LSB、最高允許速度為± 50 LSB)如果超出“精度范圍”,后繼電路將中斷輸出(圖5)。

圖5:冗余檢查技巧保證高的數據安全性


評論