RS-485串行數據通信協議

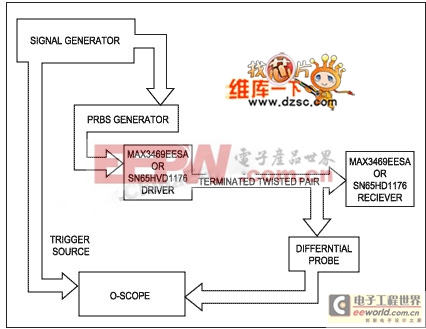
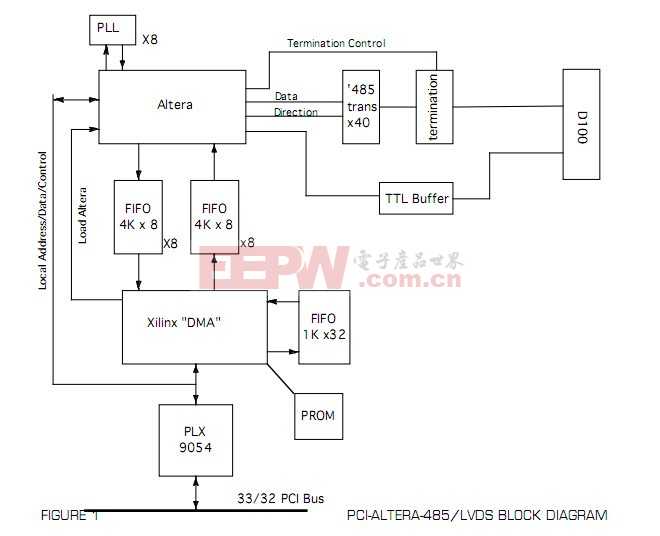
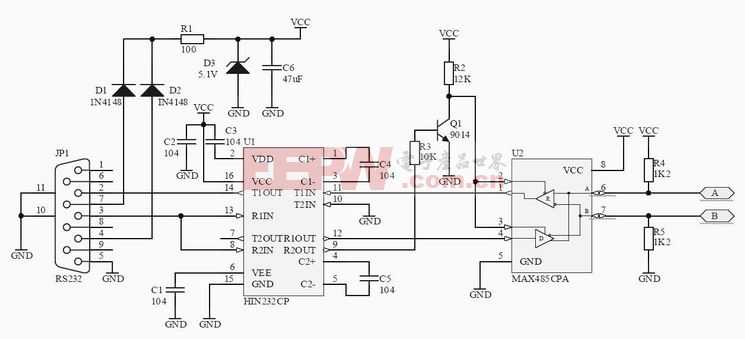
圖1. 測試裝置
系統設計人員經常從兩個不同廠商選擇驅動器和接收器,多數設計人員最關注的是RS-485驅動器的傳輸距離和速度。Maxim驅動器(這里指MAX3469)與其它制造商的驅動器性能比較如圖2、圖3所示。
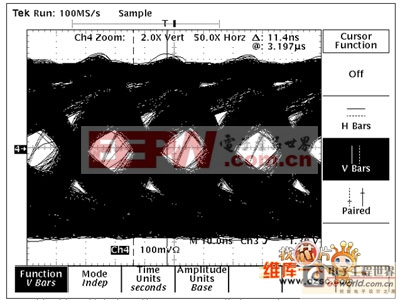
圖2. 在特定比特率、電纜長度下的抖動特性,抖動是在±100mV差分信號下測量的
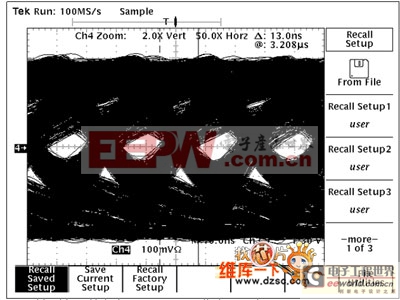
圖3. 在特定比特率、電纜長度下的抖動指標,抖動是在0V差分信號下測量的
通過觀察驅動器的差分輸出信號的完整性,利用示波器確定80mV與-400mV之間的翻轉門限(由于接收器具有200mV至-200mV的輸入范圍和噪聲裕量,因此選取這一門限范圍)。然后,當脈沖(比特)開始“傳送”時,用眼圖確定失真度、噪聲以及碼間干擾(ISI)。
ISI指標限制了比特率,以保證系統能夠在脈沖之間識別出傳輸數據。對圖1電路的測試結果表明翻轉門限與眼圖模板之間具有相關性。該眼圖模板存在50%的抖動,按照National Semiconductor的應用筆記#977[3]所介紹的方法進行測量。測量0V差分信號和±100mV差分信號下的抖動,得到圖4和圖5所示數據
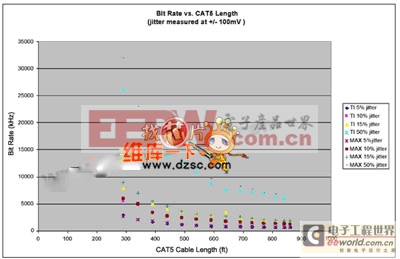
圖4. Maxim的MAX3469與其它RS-485驅動器件的眼圖對比[4]
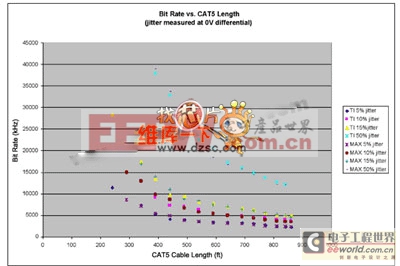
圖5. MAX3469的眼圖
對于一個點到點通信系統,從±100mV差分信號(圖4)或0V差分信號(圖5)下的測試結果可以看出比特率與電纜長度的關系。+100mV和-100mV門限能夠正確切換差分信號大于200mV的信號,因此,該門限值可確保接收器正確接收數據(圖5數據僅適用于可在0V差分輸入下切換的理想接收器)。
眼圖和故障模式
采用340英尺的5類電纜,圖2給出了39Mbps傳輸速率下的驅動器輸出眼圖,圖中,信號從“眼”的中間穿過 - 這種情況表明可能出現誤碼。然而,在相同數據速率下,Maxim公司的器件不會出現這種情況(圖3)。Maxim的收發器具有對稱的輸出邊沿和較低的輸入電容,性能良好。
采用上述測試對兩款驅動器進行比較。當數據速率較高、電纜較長時,Maxim驅動器的性能更出色。圖5給出點對點網絡中Maxim器件的傳輸速率和距離的估計值。根據經驗,所產生的誤碼大致符合50%抖動極限的要求。

數字通信相關文章:數字通信原理
通信相關文章:通信原理
雙絞線傳輸器相關文章:雙絞線傳輸器原理

評論