水塔水位自動控制系統研究

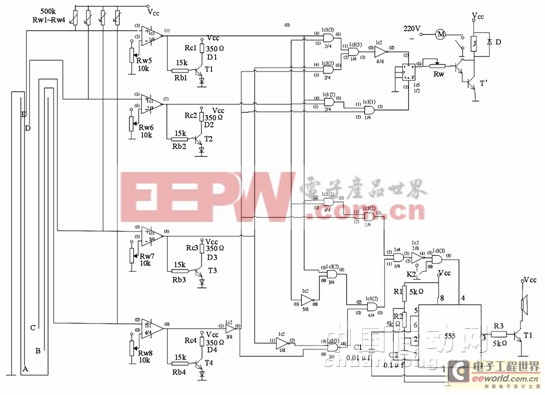
圖5水塔供水系統的最終連線圖
3.3系統優化
從圖5中可以看出,B、C、D、E四個探頭每個都接有一個運算放大器。實際運行中,當某個探頭出現故障時,系統可以及時檢測到,不會造成誤動作的產生。同時,新增了報警確認電路。這樣,當誤動作產生以及水塔內水位的過低或者過高,都會啟動報警裝置。一旦系統發生報警,就可以及時去處理問題。問題處理完畢之后,工作人員可以手動關閉報警裝置。因此,優化的方案增強了系統的可靠性、穩定性和實用性。
4水塔水位控制器的可行性試驗
4.1可行性試驗
圖6為水塔水位控制器的外觀正視圖,由電源指示燈、報警確認燈、水位指示燈以及報警確認開關組成。接通電源時,電源指示燈亮,當水塔中水深處于不同位置時,水位指示燈B、C、D、E情況不同。
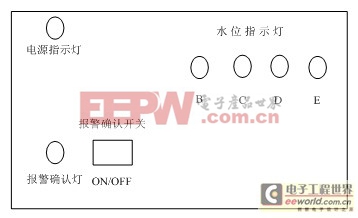
圖6水塔水位控制器外觀圖
①當水位處于B點之下,指示燈B、C、D、E全亮,報警電路開始報警,即下限報警。
②當水位處于B、C之間,指示燈B滅,C、D、E亮,水泵開始進水。
③當水位處于C、D之間,指示燈B、C滅,C、D亮,保持狀態,即保持進水。
④當水位處于D、E之間,指示燈B、C、D滅,E亮,停進狀態,即水泵不工作。
⑤當水位處于E點之上,指示燈B、C、D、E全滅,水泵不工作,報警電路開始溢出報警,即上限報警。
⑥報警電路可以手動關閉,只要按下報警確認開關,就可以解除報警的蜂鳴聲。此時,報警確認燈亮起。處理完故障時,必須關閉報警確認燈,報警確認電路復位,恢復其監測故障的功能。
4.2可行性分析
此方案采用純硬件電路設計,避免了軟件程序設計中的不穩定因素,提高了實際運用中的可靠性。同時,對于不同類型的液體,此系統均有良好的兼容性。當水塔中液體改變時,只需要將電位器中的阻值和該液體的阻值調節到一個數量級上就可以很方便的實現此液體的水位控制操作。試驗證明,此水塔水位控制器不僅實現了對水塔水位的精確控制,而且,此系統更具有工業生產的實際性。
5結束語
本文通過介紹自行設計的水塔水位控制器,系統地闡述了設計方案及成品試驗。試驗證明,該系統在運行期間穩定性高,完全符合預先規定的標準,是可以投入生產的水塔水位控制器。
參考文獻:
(1)胡壽松主編.自動控制原理.第四版.北京:科學出版社,2001年
(2)劉豹主編.現代控制理論.第二版.北京:機械工業出版社,2004年
(3)GeneF.Franklin,J.DavidPowell,Abbas.Emami-Naeini,FeedbackControlofDynamicSystems,PublishingHouseofIndustry
(4)朱曉青主編.過程檢測控制技術與應用.北京:冶金工業出版社,2002年
(5)姚伯威,孫銳主編.控制工程基礎.北京:國防工業出版社,2002年
(6)李朝青編著.單片機原理及接口技術.簡明修訂版.北京:北京航天航空大學出版社,1998年
(7)戴文進,章衛國主編.自動化專業英語.武漢:武漢理工大學出版社,2001年
(8)談振藩編,自動控制專業英語.哈爾濱:哈爾濱工程大學出版社,1999年









評論