模糊自適應(yīng)PID在汽車底盤測功機中的仿真研究

1.3.4 模糊控制規(guī)則
kp、ki、kd的模糊控制規(guī)則表建立好以后,根據(jù)模糊論域和隸屬度函數(shù)可以求出各個子集的隸屬度,根據(jù)各模糊子集的隸屬度賦值表和各參數(shù)模糊控制模型,應(yīng)用模糊合成推理設(shè)計PID參數(shù)的模糊矩陣表,查表修正參數(shù)帶入下式計算:

其中,kp'、ki'、kd'為設(shè)置的初始值,{ei,eci}p、{ei,eci}i、{ei,eci}d為通過模糊調(diào)整后的調(diào)整值。參數(shù)調(diào)程規(guī)則表如圖4所示。
2 模糊自適應(yīng)PID控制仿真及結(jié)果分析
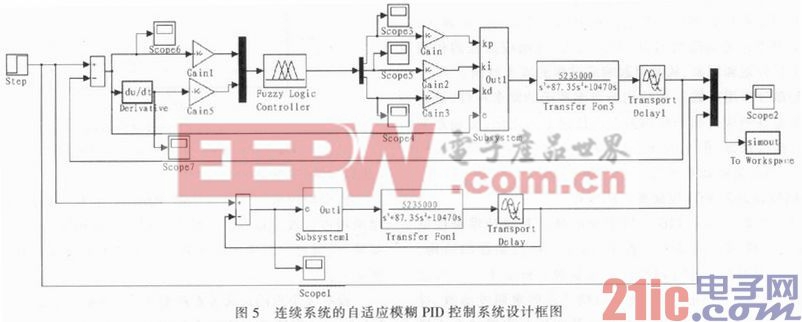
2.1 SIMULINK仿真
打開MATLAB的SIMULINK工具箱,利用SIMULINK內(nèi)的子模塊庫設(shè)計仿真電路,設(shè)計時調(diào)整好各個模塊的參數(shù),如各種數(shù)值算法、仿真時間、仿真步長等。為了便于調(diào)整,對其中的部分模塊進行了封裝,封裝成不同的子模塊。最后可將結(jié)果送入模擬示波器給予顯示,或送到工作空間,如仿真結(jié)果不滿意,可適當調(diào)整量化因子和比例因子,再調(diào)整模糊規(guī)則和隸屬度函數(shù)。
仿真時采用的系統(tǒng)函數(shù)為工業(yè)常用的仿真系統(tǒng),其系統(tǒng)函數(shù)為:
![]()
仿真圖如圖5所示,仿真時間為50 s,是對連續(xù)控制系統(tǒng)進行的模擬。仿真前首先在MATLAB的Command Window中輸入sub_1=readfis(‘sub_1’),使模糊控制規(guī)則讀入到工作空間,然后雙擊Fuzzy Logic Controller,添加sub_1(模糊控制規(guī)則)到模糊邏輯模塊。為了便于比較,將模糊自適應(yīng)PID控制與經(jīng)典的PID控制在同一模塊中仿真。
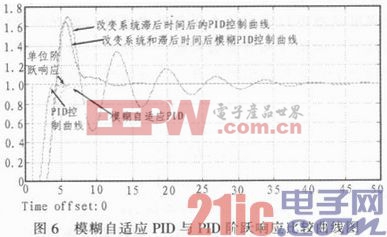
若將系統(tǒng)函數(shù)改成:![]() 時,并加大延遲時間為2 s,其各控制曲線圖如圖6所示。
時,并加大延遲時間為2 s,其各控制曲線圖如圖6所示。
其參數(shù)整定原則如下:
1)當誤差絕對值較大時為使系統(tǒng)具有較好的跟蹤性能,應(yīng)取較大kp的與較小的kd。
2)當誤差絕對值和誤差變化率的絕對值中等大小時,為使系統(tǒng)超調(diào)較小,kp應(yīng)取得小。
3)當誤差絕對值較小時,為使系統(tǒng)具有較好的穩(wěn)定性,kp與ki均應(yīng)取大些,同時為避免系統(tǒng)在設(shè)定值出現(xiàn)振蕩,當誤差變化率絕對值較大,kd可取得小些,較小時,kd可取大一些。
具體調(diào)整規(guī)則如下:先整定kp、令ki、kd均為零,使kp由小到大,找出最佳響應(yīng)曲線,確定好kp的最優(yōu)值,在此基礎(chǔ)上將ki有小到大,找出靜態(tài)誤差最小時的最佳ki值,然后,觀察曲線的超調(diào)量大小,若超調(diào)量過大,使kd由小到大逐步調(diào)節(jié),邊調(diào)節(jié)邊觀察超調(diào)量的大小,找出最佳的kd,而使超調(diào)量最小,若超調(diào)量在允許的范圍內(nèi),可令kd=0,反復(fù)上述過程,找出最佳的kp、ki、kd。
2.2 軟件編程仿真
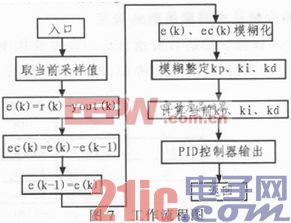
利用MATLAB提供的運行環(huán)境,編寫M文件,仿真時間為1 s,采樣時間為1 ms,將模糊PID控制和PID控制分別進行仿真,在第500個采樣時間控制輸入加入1.0的脈沖干擾,其工作流程圖如圖7所示。
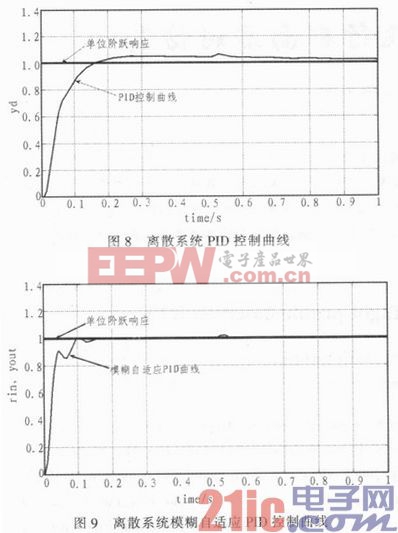
仿真結(jié)果如圖8,9所示。
3 結(jié)論
在經(jīng)典PID控制的基礎(chǔ)上設(shè)計了模糊自適應(yīng)PID控制系統(tǒng),該系統(tǒng)基于大滯后、時變、非線性等復(fù)雜環(huán)境,從上圖的SIMULINK和軟件編程仿真結(jié)果可以看出,PID參數(shù)的調(diào)節(jié)對系統(tǒng)的性能影響很大,良好的參數(shù)設(shè)置使得模糊自適應(yīng)PID控制器具有響應(yīng)速度快、超調(diào)量小、控制精度高等優(yōu)點,具有良好的跟蹤性能,較好的抗干擾性能,較強的魯棒性能,可以達到系統(tǒng)控制精度的要求。在控制系統(tǒng)中被廣泛應(yīng)用,為下一步應(yīng)用于汽車底盤測功機作準備。







評論