岸邊橋式集裝箱起重機PLC程序的設計與實現

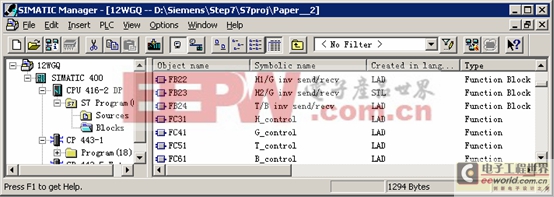
圖2-7:岸橋主要機構對應功能FC
這些功能FC的作用如下:
l FB22 起升/大車1#變頻器PROFIBUS總線數據傳輸
l FB23 起升/大車2#變頻器PROFIBUS總線數據傳輸
l FB24 小車/俯仰變頻器PROFIBUS總線數據傳輸
l FC31 起升運行控制
l FC41 大車運行控制
l FC51 小車運行控制
l FC61 俯仰運行控制
2.2.4. 岸橋輔助機構的運行程序
在岸橋上還有一些輔助機構需由PLC程序來控制。這些功能FC如下圖2-8所示:
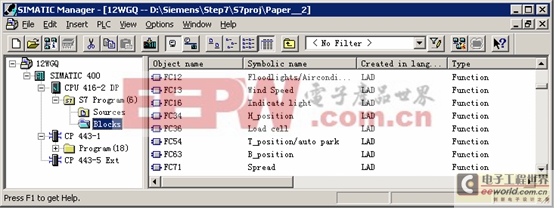
圖2-8:輔助機構控制
這些功能FC的作用如下:
l FC12 投光燈,空調的啟動,停止控制。
l FC13 風速處理:當風速達到警報值時發出信號。
l FC16 指示燈顯示:控制各個操作站的指示燈。
l FC34 起升編碼器位置處理:判斷起升上下的停止,減速位置等。
l FC36 負載重量處理:判斷負載是否超過額定。
l FC54 小車編碼器位置處理:判斷小車前后的停止,減速位置等。
l FC63 俯仰編碼器位置處理:判斷俯仰上下的停止,減速位置等。
l FC71 吊具控制:吊具在起吊集裝箱時的控制,如吊具鎖頭的開閉功能。
結合岸橋主要機構,輔助機構控制的功能FC,以及PROFIBUS總線通訊數據傳輸的功能塊FB等,完成了岸橋PLC程序的設計。
3. PLC程序的統一性問題
3.1. PLC程序統一性問題的發現
在岸橋的PLC程序編寫完成后,我們隨即在岸橋上進行了調試,由此發現了程序的統一性問題,該問題是這樣的:我們所進行的這個項目有12臺岸橋,在岸橋上,有些數據的定義需根據現場的實際情況來定義,舉一簡單的例子:
比如小車機構位置編碼器的零位數據OFFSET,對于調試的第一臺岸橋,我們可以很容易加以這樣定義:將小車機構行駛到最后面的終點位置,讀出小車在該位置時位置編碼器的讀數,以此作為小車機構位置編碼器的零位數據OFFSET。但我們在調試第二臺岸橋時發現,由于機械安裝的誤差,第二臺小車機構行駛到最后面的終點位置時,讀出的小車位置編碼器讀數與第一臺岸橋的數值不相同。也就是說,我們必須將第二臺岸橋的小車機構位置編碼器的零位數據OFFSET設置成不一樣的數據。
與此有相同問題的數據還有諸如重量傳感器的比例系數,小車自動停車時停車位置點,俯仰機構的上升終點位置等等。這些問題都產生了一個后果,調試結束后每臺岸橋都有對應的PLC程序,彼此之間不統一。
3.2. 解決PLC程序統一性問題的分析
分析這個問題,我們設想了以下解決問題的方法:
n 我們可以增加設計這樣一段解決問題的“岸橋編號識別”程序:首先讓各臺岸橋編號:比如岸橋1,岸橋2。。。。。。岸橋12,PLC程序運行“岸橋編號識別”程序來判定該岸橋的編號,如果是岸橋1,“岸橋編號識別”程序就執行將岸橋1的數據裝載到一“共用數據塊”。
“岸橋編號識別”執行完畢后,我們所需要的數據都在這“共用數據塊”中,之后PLC在程序運行時,如需要用到那些各臺岸橋有差異的數據,就可以從該“共用數據塊”中讀取所需要的數據。整個過程如圖3-1所示:
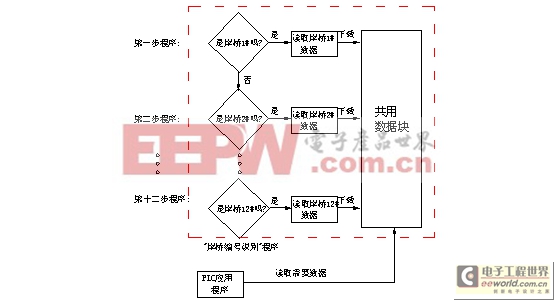
圖3-1:“岸橋編號識別”程序
3.3. PLC程序統一性問題的處理
有了以上的思路,接下來我們就著手開始解決這個PLC程序統一性問題:
l 第一步:對岸橋進行編號:
將岸橋定義為岸橋1# 至岸橋12# ,但是如果要讓PLC能夠識別這些編號,那么我們必須設置輸入信號送給PLC,我們利用了一個備用的輸入字節IB256來定義岸橋的編號,在PLC系統的硬件輸入上,我們按此定義對各臺岸橋接入高電平,每臺岸橋不同,如下圖3-2所示:

評論