基于K線/CAN總線的KWP2000協(xié)議分析及協(xié)議棧的開發(fā)測試

K線網(wǎng)絡結構單一,網(wǎng)絡管理功能很弱;而利用CAN總線可構建復雜的網(wǎng)絡結構,可跨越網(wǎng)段進行遠程診斷。
K線網(wǎng)絡采用破壞性的仲裁機制,當診斷設備采用功能尋址與多個ECU進行通訊時,為避免總線沖突,ECU開發(fā)者必須采取措施保證多個ECU順序訪問總線;而CAN網(wǎng)絡采用非破壞性的仲裁機制,并且仲裁過程由數(shù)據(jù)鏈路層完成,當診斷設備采用功能尋址與多個ECU進行通訊時,ECU開發(fā)者不必考慮總線訪問沖突問題。
K線服務報文最大字節(jié)長度僅為255,無法滿足更長報文的傳輸要求,并且在長報文的傳輸過程中用戶必須自己采取措施進行連接管理,可靠性和兼容性較差;而CAN總線診斷服務報文最大字節(jié)長度可達4096(12位),對于長報文的傳輸,網(wǎng)絡層協(xié)議還具備標準化和規(guī)范化的同步控制、順序控制、流控制和錯誤恢復等功能,具備很高的可靠性、兼容性。
5 KWP2000協(xié)議棧的開發(fā)及測試
從前面的協(xié)議分析可以看出,無論是基于K線還是CAN總線的KWP2000協(xié)議,都是邏輯非常復雜的系統(tǒng),并且具有嚴格的定時和錯誤處理規(guī)范。如果采用純手工的方式來進行KWP2000協(xié)議棧的開發(fā),不僅要耗費大量的時間和人力,其通用性、完備性、可靠性和可維護性都很難保證。而MATLAB/Simulink/StateFlow不僅具備方便快捷的上層實時仿真環(huán)境,還集成了高效的嵌入式代碼自動生成工具,為協(xié)議棧的開發(fā)和維護提供了強大的支持平臺。此外,由德國Vector公司的CANoe軟件和相關硬件板卡組成的應用開發(fā)平臺,可用于汽車網(wǎng)絡(CAN,Lin等)的上層協(xié)議開發(fā)和系統(tǒng)測試,該平臺同時支持基于K線和CAN總線的KWP2000診斷協(xié)議,可作為ECU和診斷設備的測試標準。
圖6是協(xié)議源碼開發(fā)過程示意圖。首先在MATLAB/Simulink/StateFlow中遵照協(xié)議標準進行KWP2000協(xié)議棧開發(fā),在仿真調試環(huán)境下實現(xiàn)通訊邏輯、定時控制和錯誤處理,待系統(tǒng)完善后利用StateFlow嵌入式代碼生成工具自動生成協(xié)議棧C代碼,并與目標系統(tǒng)的底層驅動進行集成,然后植入目標系統(tǒng)形成應用程序,最后再利用CANoe作為標準進行系統(tǒng)集成測試。
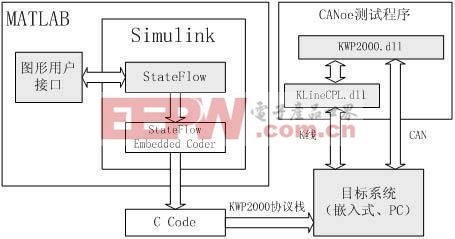
圖6 KWP2000協(xié)議棧開發(fā)及測試流程
在MATLAB/Simulink/StateFlow中進行協(xié)議棧仿真開發(fā)是協(xié)議棧開發(fā)過程中的關鍵環(huán)節(jié),在這一過程中必須嚴格遵照協(xié)議標準來實現(xiàn)通訊邏輯,往往需要經過多次“設計-仿真-修改”循環(huán)才能使系統(tǒng)最終趨于完善。MATLAB的圖形界面提供了方便快捷的仿真輸入/輸出接口,可大幅度加快開發(fā)進度。
協(xié)議棧開發(fā)完成后可利用CANoe作為標準進行系統(tǒng)集成測試,CANoe的KWP2000協(xié)議測試環(huán)境如圖7所示。
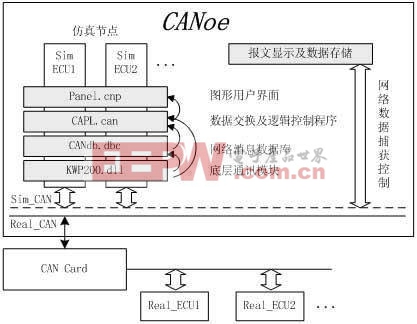
圖7 CANoe的KWP2000測試環(huán)境示意圖
CANoe中的KWP2000實際指的是基于CAN總線的KWP2000,即15765協(xié)議。由于CANoe默認的硬件板卡是CAN卡,因此在建立仿真程序時,只需將ECU的網(wǎng)絡模塊設置為kwp2000.dll即可進行CAN總線的KWP2000服務測試。kwp2000.dll中包含15765應用層協(xié)議中規(guī)定的服務請求、服務指示、服務響應和服務確認接口函數(shù),用戶調用這些函數(shù)即可完成Tester端和ECU端的KWP2000診斷服務。此外,該模塊中的功能函數(shù)還可對ECU的源地址、目標地址、尋址模式等參數(shù)進行動態(tài)設置。需要注意的是,kwp2000.dll目前只提供了部分KWP2000服務的接口函數(shù),如果用戶需要進行其它的KWP2000服務測試,必須根據(jù)KWP2000應用層協(xié)議構造服務報文數(shù)據(jù),然后調用該模塊中的KWP_DataReq()和KWP_GetRxData()函數(shù)進行報文的發(fā)送和接收。
進行基于K線的KWP2000服務測試時,需要將KLineCPL.dll模塊加入CANoe仿真環(huán)境,并使用一個代理節(jié)點來實現(xiàn)CAN網(wǎng)絡和K線之間的報文轉發(fā)。此時CANoe使用計算機的串口,并通過一個串口/K線轉換器與實際的ECU相連,如圖8所示。
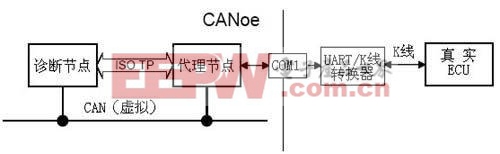
圖8 CANoe中基于K線的KWP2000測試連接示意圖
6 結束語
KWP2000是一套非常完善的車載故障診斷協(xié)議標準,協(xié)議的分層結構使得KWP2000診斷服務并不依賴于某種特定的網(wǎng)絡介質,其應用層可以移植到任何一種物理層和數(shù)據(jù)鏈路層協(xié)議之上。基于CAN總線的KWP2000順應了目前車載網(wǎng)絡發(fā)展的大趨勢,將逐步取代K線診斷協(xié)議,成為下一代車載診斷協(xié)議的主流之一。
MATLAB/Simulink/Stateflow為協(xié)議棧開發(fā)提供了方便直觀的圖形用戶接口和功能強大的仿真調試環(huán)境及代碼生成工具,為嵌入式開發(fā)開辟了一條高效快捷之路。Vector公司的CANoe和相關硬件板卡是一個功能強大的應用開發(fā)平臺,可針對基于K線和CAN總線的KWP2000進行ECU和診斷設備的上層協(xié)議開發(fā)、測試及仿真。










評論