紅外遙測式路面善傳感器的水厚度測量

1 概述
本文引用地址:http://www.104case.com/article/235420.htm路面狀況傳感器根據水、冰、雪的不同紅外光譜特性,通過對干燥路面反射的光譜信息和有覆蓋物的情況下得到的光譜信息的對比,實時檢測路面的干、潮、積水狀態,測量水、冰、雪的覆蓋類型和覆蓋厚度。克服了現有接觸式路面狀態傳感器安裝復雜、維護困難的缺點,而且具有實測面積大、目標更直接、路況信息更真實的優點。本論文詳細闡述了多光譜在路面水厚度檢測的應用。
2 傳感器檢測原理
2.1 測量波長的選擇
紅外光照射在水冰雪上發生散射、吸收、反射、折射等一系列作用[1],路面狀況根據水吸收光譜、冰吸收光譜、雪散射光譜篩選出三個波長紅外光,λ2和λ3處于水和冰的吸收峰,由于照面表面反射及水分子和固體顆粒對光信號的吸收和散射共同作用,實測到的后向散射信號的表現如下,其中水對三個波長的主要為反射和吸收,后向散射系數λ1>λ3>λ2;冰對三個波長的后向散射系數λ1>λ2>λ3;雪對三個波長的后向散射系數[2]λ1>λ2>λ3;根據三個后向散射光信號與路面干燥時光信號的比值的大小及差值,可以定性分析路面狀況、計算出水冰雪厚度。
2.2 硬件電路結構
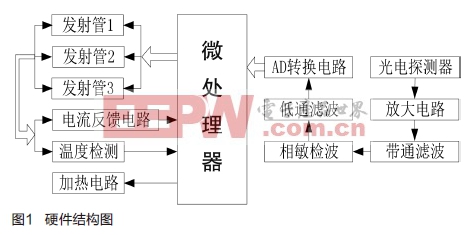
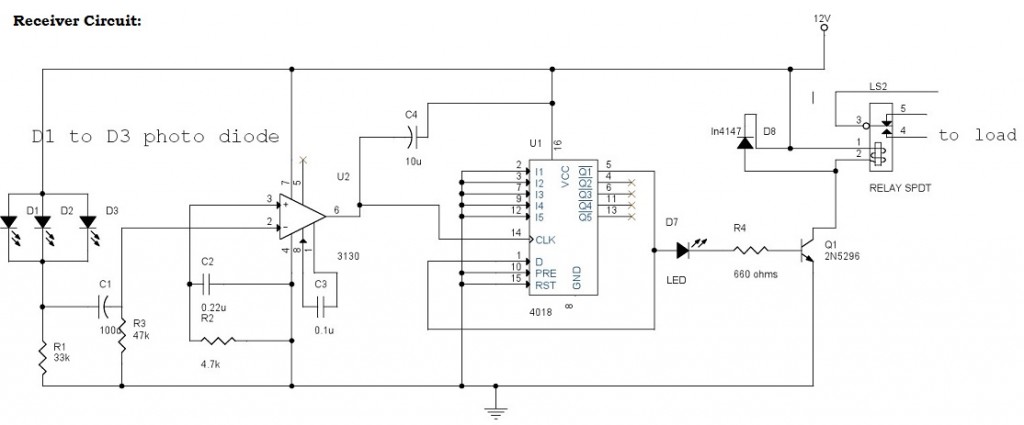
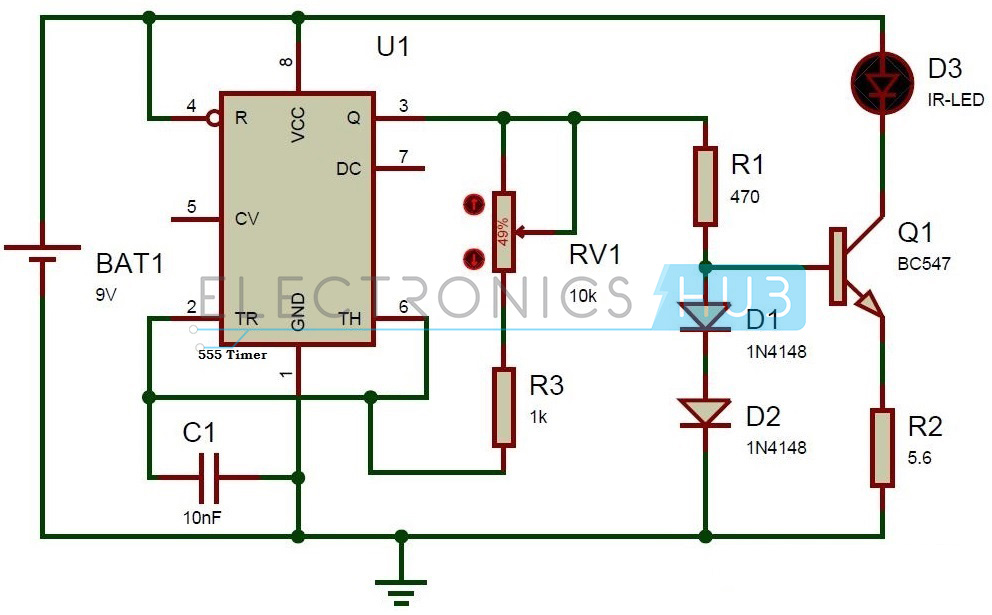
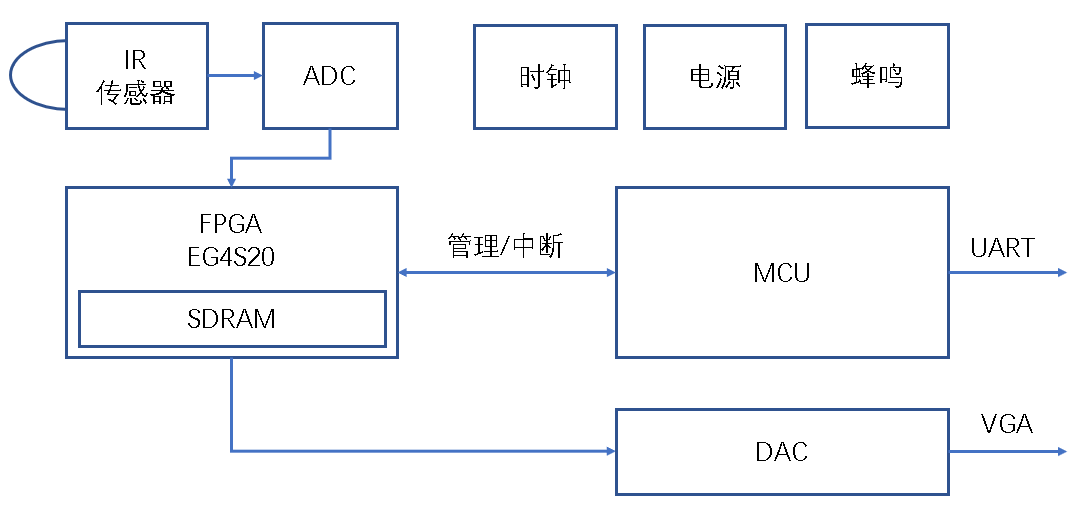
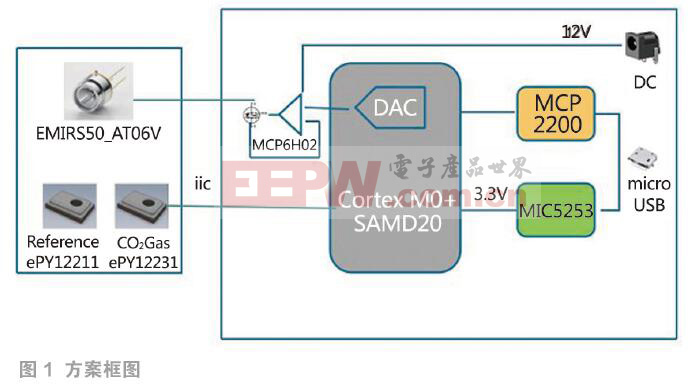
傳感器使用單色性好、體積小、工作電壓低的激光二極管提供陣列式紅外光源,以脈沖調制波發射紅外光束,利用反饋電流穩定光功率[3]、溫度補償穩定光譜;光電二極管接收反射回來的微弱的紅外光信號,利用兩級電路進行濾波、放大,然后進行AD轉換,送入微處理器,進入模型計算(如圖1)。
2.3 檢測理論支持
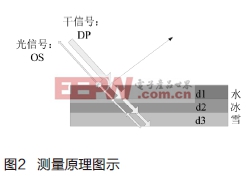
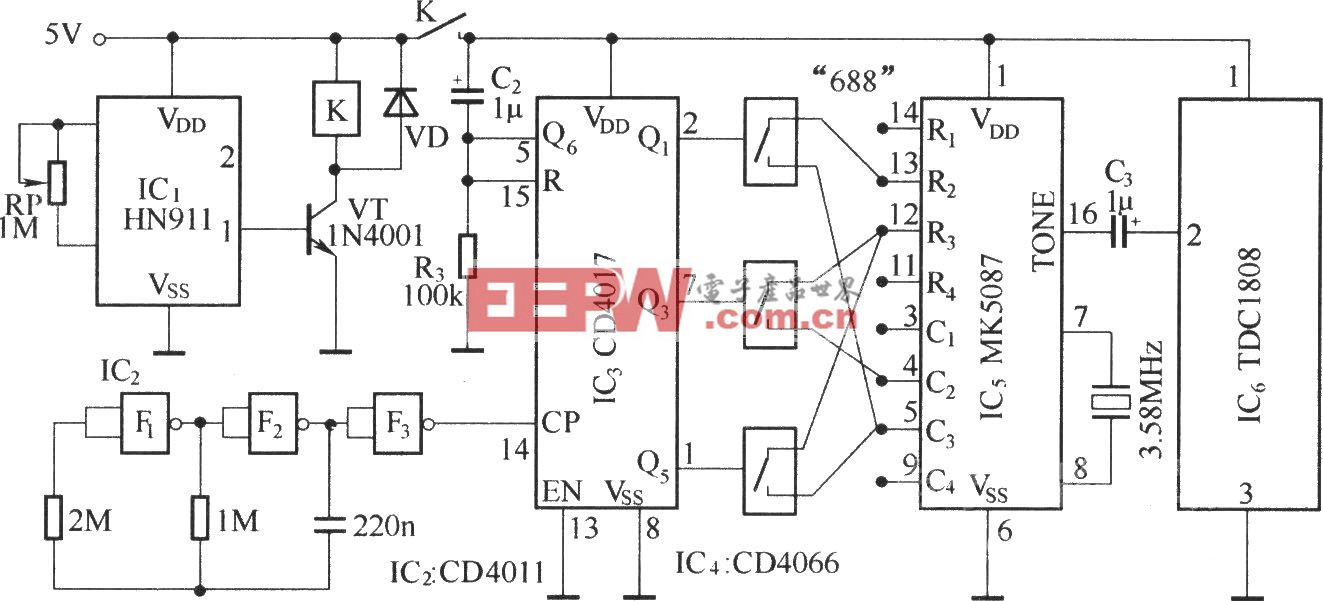
將傳感器以一定角度架設在路邊,在路面干燥時進行干標定,獲得干參數DP1、DP2、DP3,一旦傳感器位置角度等變化都會引起干參數變化,需要重新進行干標定。各條件不變時干參數相對穩定,傳感器有干信號自動調整功能,補償路面和鏡頭污染引起的干參數的微量變化;各條件不變化時,一旦路面潮濕、積水、結冰、積雪,入射光由于照面表面反射及水分子和固體顆粒對光信號的吸收和散射共同作用,實測到的三個后向散射光信號表現出不同的特點,根據三個信號的大小關系可以判別路面狀態(如圖2),根據判斷的覆蓋物種類進入不同的厚度計算公式;根據物質的吸光度可以計算覆蓋物厚度,測量理論基礎為修正的朗伯-比爾定律,采用三波長測量能夠減小覆蓋物顆粒度等引起的測量誤差,比單波長進行更精確的測量[4]。
基礎朗伯(Lambert)定律闡述為:光被透明介質吸收的比例與入射光的強度無關。在光程上每等厚層介質吸收相同比例值的光。
基礎比爾(Beer)定律闡述為:光被吸收的量正比于光程中產生光吸收的分子數目。
Ln( Io/I)= εCd (1)
公式1中:Io—入射光強度;I—通過樣品后的透射光強度;ln(Io/I)—稱為吸光度;C—為樣品濃度,我們測量的是純物質,C=1;d—為光程;ε—為光被吸收的比例系數,它與吸收物質的性質及入射光的波長λ有關。
適用于本傳感器的原理公式為:
Ln( os/dp)= εd+k (2)
公式2中:dp—干信號;os—有覆蓋物時的光信號;d—覆蓋物厚度;k—常數,路面等條件的影響。
道面狀況傳感器采用的是三個波長的陣列光譜法,根據水冰雪對三個波長的光信號具有不同的吸光系數,可以判斷覆蓋物類型;根據物質的吸光度可以計算覆蓋物厚度[4]。
公式推導:

分析結果:選擇多元線性回歸方法分析數據,假定被解釋變量與多個解釋變量之間具有線性關系,是解釋變量的多元線性函數,稱為多元線性回歸模型。即
Y=β0+β1 X1+…+βk Xk+μ
其中Y為被解釋變量,Xj(j=1,2,…,k)為第j個解釋變量,βj(j=1,2,…,k)為第j個未知參數,μ為隨機誤差項。
由以上推導可知,只要有足夠代表性的數據,就可以求出對應水冰雪厚度的3組系數,達到物質辨別和測量厚度的目的。
3 水厚測量試驗
通過對多種石材的強度和親水性進行試驗考察,選定用特制的鋪有水泥面的花崗巖精密平臺作為水標定試驗的標準平臺,以高精度磁致伸縮液位傳感器作為水厚度檢測標準,以人工和攝像頭作為輔助觀測方法。
通過多次試驗總結出水標定可行的試驗方法:
首先將試驗平臺調平,然后將傳感器架設于平臺附近,使其照射于平臺中心,進行干信號標定,在平臺上加水2mm,使其自然蒸發至干燥,完成一個試驗周期。
4 試驗結果分析
4.1 建模
設計的標定平臺和標定方法為模型建立提供了充分的試驗數據,在此基礎上進行了測量模型的建立。
從圖3實驗數據可以看出,光信號2處于水的吸收峰,所以道路表面一旦出現水膜,光信號2會劇烈減小,而且Ln(dp2/os2)一直大于Ln(dp1/os1)和Ln(dp3/os3),但是水厚增加到一定程度,由于光信號2返回信號幾乎接近最小值時,與水厚的線性關系發生畸變,但是Ln(dp1/os1)和Ln(dp3/os3)與水的線性度在2mm內一直保持良好。
模型建立的基本方法是利用matlab、spss數據分析軟件,對大量數據進行多元線性逐步回歸分析,得到光信號和不同物質的計算公式,多次標定模型復相關系數均>0.92(遠高于可接受限值0.75),光信號變化能很好的解釋覆蓋物種類及厚度變化;該模型在條件不變的情況下,得到很好的測量結果。
水厚度計算公式:
H水厚=0.465 Ln(dp3/os3)-0.749 Ln(dp1/os1))+0.3
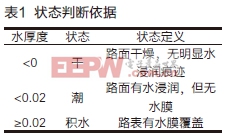
狀態判斷如表1。
4.2 驗證
實驗介紹:利用人工觀察狀態和傳感器測量厚度與樣機測量結果進行對比驗證。
物質厚度單位:mm,狀態:0 干 1 潮 2水
5 結論
根據多次室內室外試驗數據驗證,干、潮、水區分比較準確,因為水潮和潮干分界較為模糊,分界處狀態和觀察狀態稍有出入,但只是在相鄰兩個狀態有所差異,不影響狀態變化走勢,測量的水厚和水蒸發線性趨勢吻合。干信號根據目標路面標定后,干信號的大小在較大范圍內不影響路面狀態的判斷,測量的水厚度誤差會有差異,證明傳感器具有較強環境適應性。
參考文獻:
[1]張龍浩,張杰,胡青.紅外式冰箱結霜傳感器的設計和試驗研究.儀表技術與傳感器,2013(5)
[2]Kokhanovsky A A,Zege E P.Scattering optics of snow.APPLIED OPTICS,2004,Vol.43,No.71(March):1589—1602
[3]王鐵流,萬薇.陣列式紅外探測器在列車軸溫監測系統的應用.電子產品世界,2013(2)
[4]許文海,楊明偉,唐文彥.多功能半導體激光器驅動電源的研制[J].紅外與激光工程,2004(5)
[5]羅國安.可見紫外定量分析及微機應用.上海科學技術文獻出版社,1988:45

傳感器相關文章:傳感器工作原理
風速傳感器相關文章:風速傳感器原理 激光器相關文章:激光器原理 透射電鏡相關文章:透射電鏡原理 激光二極管相關文章:激光二極管原理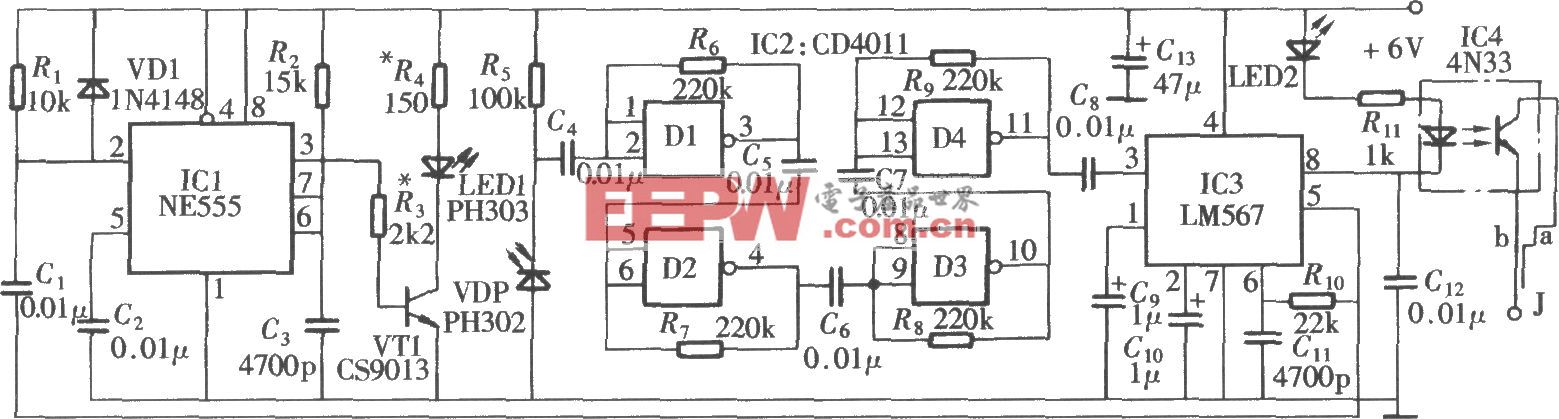


評論