一種基于GPS/北斗衛星技術的車輛調度系統的設計

現代車輛調度系統是一種集全球衛星定位技術(GPS)、地理信息技術(GIS)和現代通信技術于一體的高科技項目。它將移動目標的動態位置(經度與緯度)、時間和狀態等信息,實時地通過無線通信鏈路傳送至控制中心,而后在具有地理信息查詢功能的電子地圖上進行移動目標運動軌跡的顯示,并對目標的位置、速度、運動方向和車輛狀態等用戶感興趣的參數進行監控和查詢。目前此類系統主要采用的是GPS/GSM方式來完成定位通信要求,然而,單純的GPS/GSM方式的車輛調度系統并不能完全的滿足日常生活中的需要,例如在偏遠西部地區,深山老林等,很尖銳的一個問題在于沒有GSM信號,或者GSM信號被覆蓋的情況下,車輛調度系統就完全失效了。另外出于戰略方面的考慮,在某些非常時期(比如戰爭)美國可能關閉GPS衛星定位信號,如果我們的系統完全依賴于GPS,勢必會造成極大的損失。由于以上問題,我們設計開發了基于GPS/北斗衛星的系統設計能夠較好的解決這些問題。
本文引用地址:http://www.104case.com/article/234354.htm2 “北斗”系統簡介
我國于2000年底建立了我國自主研制衛星定位導航系統―“北斗一號”衛星定位導航系統。該系統是全天候、全天時提供衛星導航信息的區域導航系統,將主要為我國交通、運輸、海上作業等領域提供定位導航服務。
同為定位系統,我國的“北斗”定位系統和美國的全球定位系統(GPS)又不同,GPS是被動式(廣播式)的,收到信號即可定位,用戶數量不受限制,但是無法實現通信功能;而“北斗”定位系統是主動式(應答式)的,通過與中心站建立聯系實現定位功能,同時具有通信功能。“北斗”定位系統具有將通信與導航結合在一起的能力。利用兩顆同步實點衛星就能進行雙向信息交換,北斗導航定位衛星系統上、下行鏈路分別支持每秒200次定位或短信息業務,遠高于Inmarsat-C/OmniTrack等系統的并發處理能力;范圍覆蓋中國大陸所有地區和海區,與電信蜂窩網絡相比為真正意義上的無盲區覆蓋。北斗衛星導航定位系統的主要系統組成為:
(A)北斗衛星:由2顆地球同步衛星(1顆在軌備用衛星)組成;
(B)北斗地面控制中心:由信號收發、信息處理、調度、時鐘、測試分系統及配套設備五大部分組成;
(C)用戶機:衛星導航定位用戶的終端,服務范圍分兩種型號:普通型、指揮型。每臺指揮型用戶機可以控制100臺普通型用戶機;普通型用戶機按運載方式分四種:便攜型、車載型、艦載型、機載型等。
3 系統總體架構
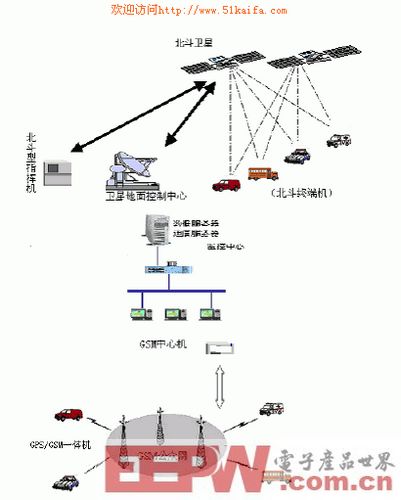
本系統由車載終端、通信鏈路、中心服務器及監控終端組成,其總體結構如圖1所示。車載終端完成車輛的定位、軌跡的存儲及信息發送, 無線通信鏈路完成信息的交互,中心服務器完成與車載終端及監控終端的連接及數據存儲,監控終端完成對車輛的監控。
?
?
圖1 系統總體結構圖
3.1 系統工作原理
出現調度信息時,車載GPS接受機接受GPS衛星的定位數據,計算出自己的地理位置經緯度坐標,然后通過車載臺的GSM模塊將位置、狀態、報警信息發送到控制中心,并存入數據庫;當不能捕捉GSM信號時,啟用北斗衛星定位系統,該系統具有定位和通信雙重功能,將車輛的位置、狀態等信息通過衛星系統發送到控制中心。
3.2 車載單元介紹
車載單元分為GPS部分和“北斗”部分。
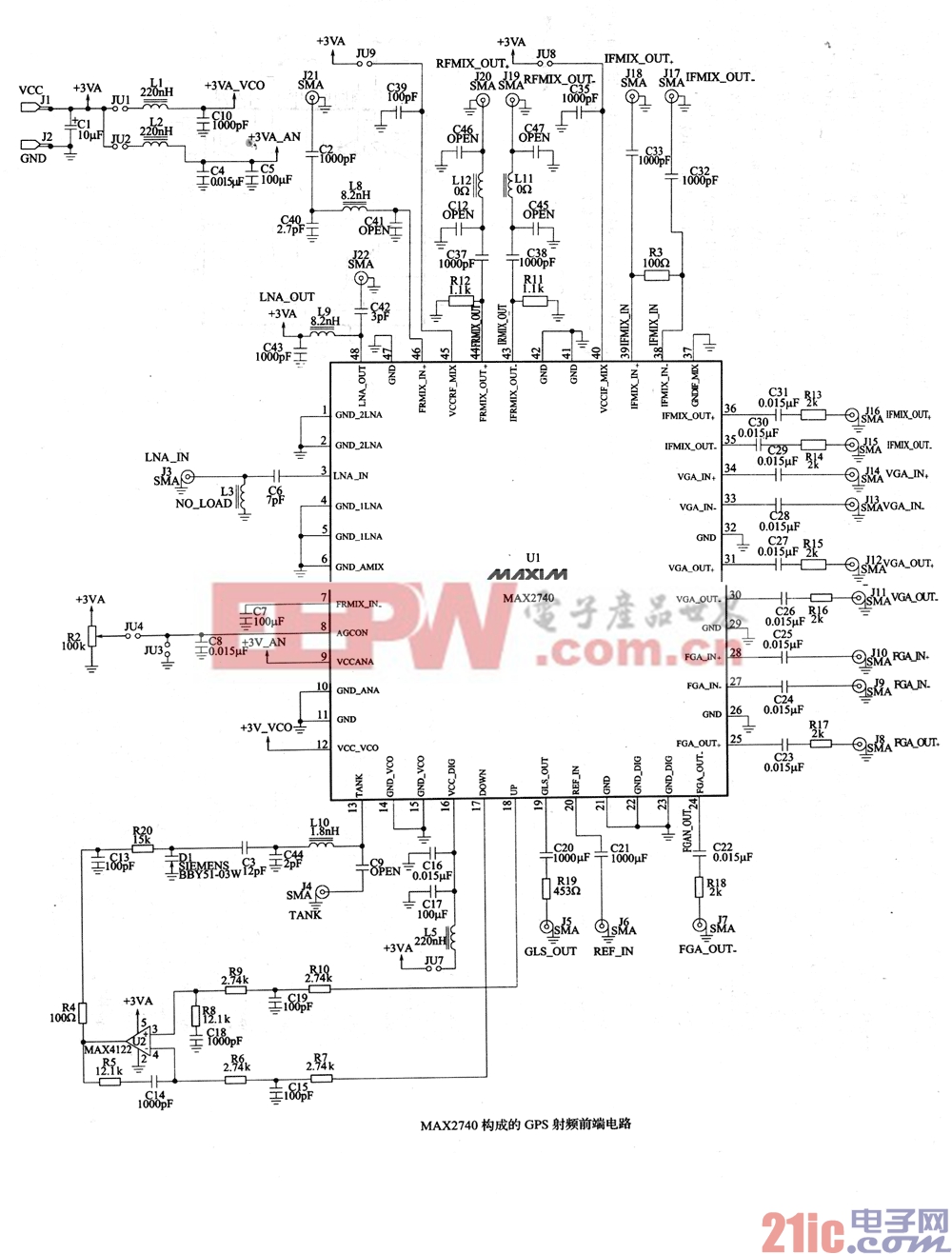
GPS車載設備選用GSM/GPS一體機,配有標準串口,可輸出NEMA-0183 標準GPS 定位數據,另外車載設備可進行語音通話和數據通信,通常情況下,車載臺通過GSM短信的方式和控制中心聯系。
“北斗”部分選用車載型用戶終端,其技術指標為:
波束寬度:俯仰方向:25°~90°;水平方向0°~360°;
頻率:采用L/S波段發/收,抗雨衰能力強,對雨霧衰減小于0.3dB;
接收頻道數:≥2;
首次捕獲時間:≤4秒;
失鎖重捕時間:≤1秒;
接收信號誤碼率:≤10-5;
發射EIRP值:≥13 dBW;
發射頻率偏移:≤2×10-7;
發射信號功率穩定度:
±0.5dB(一次最長發射信號周期);
±1 Db(24小時,工作環境條件);
發射信號載波抑制:≥30 dB;
功耗電源:直流10~32V 紋波≤1%,具備電源邏輯控制功能;
待機休眠狀態功耗:300mW;
平均功耗:≤6W;
最大發射功率:≤20W;
在能接收到GSM信號時,車載單元的信息(位置以及其他請求服務信息)通過GSM網絡傳遞GPS定位信息和發送消息;在接收不到GSM信號時,利用“北斗”系統的定位通信功能,安裝在移動目標上的北斗用戶機通過衛星向定位總站發出定位申請,定位總站根據所收到的兩顆衛星信號,計算出目標位置的經度和緯度,并通過衛星傳回到用戶機,用戶機得到位置信息,同時,該用戶機所屬的指揮機也得到該位置信息。指揮機把該位置信息直接傳輸到與之相連的定位數據服務器、GIS服務器,在電子地圖上顯示該車輛位置。監控中心人員根據直觀的圖文信息對車輛實施有效的調度和監控,通過以上過程完成從移動車輛到用戶指揮控制中心的數據通信。
3.3 控制中心介紹
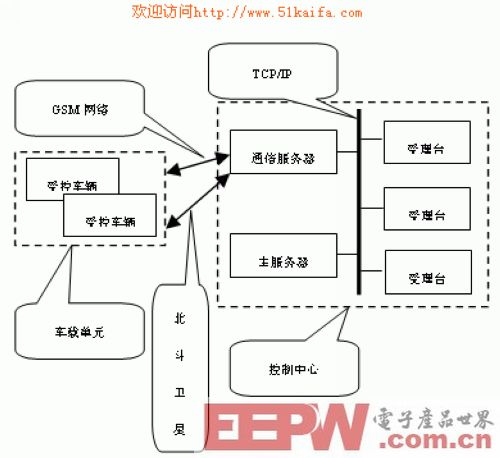
本系統采取主控制中心+受理臺相結合的C/S結構聯合控制的工作模式。主控制中心由數據庫子系統、通信子系統、呼叫受理子系統組成;受理臺包括通信子系統、GIS子系統主控制中心和各受理臺通過專線組成計算機網絡,互相交換數據、共享信息,實現群體調度、聯網報警、絕對保證安全的高要求。
控制中心結構如圖2所示。
?
?
圖2 控制中心結構框圖
3.4 系統主要功能
車輛跟蹤監視:
對行駛中的車輛的位置(包括經度、緯度)進行跟蹤監視,將車輛運行位置形象直觀地顯示在監測區域的電子地圖上。定位間隔時間可以自主設定。
指揮調度:
監控中心可通過車載設備的通話手柄,對車輛實施語音或數字指揮調度。
報警受理:
當車輛報警時,監控中心將收到聲光報警的提示,同時對報警車輛進行屏幕自動跟蹤,顯示以報警車為中心的距離標識,根據車輛檔案庫,顯示報警車輛的各種參數,如編號、車型、車牌、顏色、車主等等。
車輛控制:
采取相關技術措施,在車輛被竊確后,監控中心可通過遙控使車輛斷電等方式使車輛不能行駛,也可讓該車發出聲光求救信號。
車輛管理:
結合車輛位置信息和狀態信息,可對車輛及駕駛人員的工作狀況進行有效的記錄和統計。
數據報表輸出:
每日、每月的報警表格記錄輸出,報警地點地圖,用戶使用情況報表、登錄注銷表輸出。監控中心可查閱車輛每天的登錄或注銷信息,也可查閱車輛檔案,并能打印輸出每日的監控報表。
車輛軌跡回放:
監控中心可隨時回放受控車輛以往的行駛路線。
網絡管理:
主控制中心與受理臺的網絡管理。
信息調配:
控制中心擁有全部用戶的資料,及全部服務區域的地理信息,輔助信息,可對全網系統資源進行調度,對同時實現各種跟蹤的用戶數在各用戶監控中心之間進行調配。
4 系統軟件設計
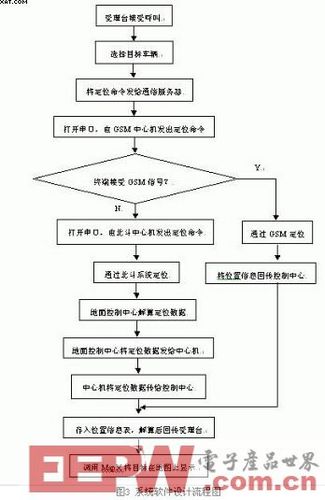
軟件系統的主要模塊有目標定位調度、數據傳輸、軌跡回放、移動目標基本信息管理等。該系統采用了C/S結構,利用Windows Sockets、大型數據庫、TCP/IP網絡和MapX等技術,實現了“北斗”系統與GPS的融合,擴大了應用范圍。其軟件流程圖如圖3所示。
在系統軟件設計中,我們使用了一些主流的技術,使得我們的系統是一個開放的系統,在兼容性和擴展性上都做了充分的考慮。在網絡的數據傳輸的實現上我們主要采用了Windows Sockets技術,采用現在十分流行的TCP/IP協議來傳遞數據。在GIS系統設計上,使用MapInfo制作電子地圖并調用了MapX二次開發工具完成電子地圖的各項操作。在訪問數據庫方面,我們采用的是微軟ODBC標準下的ADO數據接口對數據庫進行訪問。
5 數據庫管理設計
在考慮到系統的性能價格比的前提下,經過論證,采用MS SQLSERVER2000數據庫。系統數據庫包括GIS數據庫,系統數據庫。根據使用者登錄信息操作不同的權限,設置普通操作員等級、指揮人員等級、系統管理人員等級、系統維護人員等級等多重等級身份,對于不同等級的使用人員可以有不同的使用權限。
GIS數據庫存放的是地理信息,包括地圖信息及其空間關系;系統數據庫包括定位信息表,車輛信息表,通信信息表,車輛狀態信息表,異常信息表。
?
?
6 結束語
本系統建立了一個以“北斗”為定位通信手段、功能完備的移動目標調度系統,能夠對移動目標實時有效的定位、跟蹤、通信、指揮、調度管理,實現了“北斗”系統與GPS的融合,擴大了移動目標調度系統調度范圍;充分應用了北斗衛星系統定位通信功能,使移動目標調度系統的調度導航、通信集成一體,提高了系統整體集成度,方便了調度中心對移動目標的調度管理。
當今的移動目標調度系統的定位部分都是基于美國的GPS或俄羅斯的GLONASS,基于我國主研制的北斗衛星導航系統的移動目標調度系統基本沒有。通過充分借鑒以往經驗,本文所建立的車輛調度系統考慮到了“北斗”系統的特殊性以及移動目標車輛調度時所需功能。該系統已被成功應用于120急救系統中,獲得了用戶的支持與認可并為“北斗”系統在其他領域的應用打下了基礎。

波段開關相關文章:波段開關原理











評論