基于單片機控制的智能軟啟動大功率恒流源設計

電源啟動過程中瞬時電流沖擊很大, 對電源和器件的使用壽命有很嚴重的影響, 采用良好的控制方法對啟動電流進行控制以減小其危害, 使啟動過程中無瞬間沖擊且能連續變化, 是電源啟動控制中關鍵的一步。電源軟啟動方式就是控制輸出電壓和電流, 使負載的電壓和電流漸增。對于線性時不變模型的被控對象適當整定PID 參數可獲得較滿意的控制效果, 可以很好地解決電流過大的問題。PID 控制能很好地解決啟動過程中震蕩和超調的問題, 可以更好地保護電源, 且啟動可靠、穩定性強。采用單片機作為控制器, 編程靈活、性價比較高, 易實現人機界面管理。利用軟件調整系統的非線性, 以降低實測值與設定值之間的偏差。電源電壓或電流的波動、電路元件的老化、環境溫度等因素都將影響電源的穩定性。為了穩定地控制電源功率, 該方案采用基于單片機的高速AD、DA 數據采集系統, 并采用PID算法實現大功率電源的軟啟動, 系統采用PID 電壓采樣反饋控制輸出電流的恒定不變, 精度較高、響應速度較快、靈活性較好、穩定性較高。
1.1 電源系統設計
以單片機為核心, 完成以下功能: 處理鍵盤輸入數值, 包括電路預定值和“+” 、“-” 步進; 控制數LCD 顯示預定值和實際值; 控制ADC 和DAC; 根據得到的反饋信號通過程序控制算法進行偏差值補償。由于運放OPA549 一路受D/A 轉換器控制, 調整運放OPA549 輸入端電壓, 一路為比例放大電路。當DAC 輸出預定值或步進值后, 電流源的輸出在0 ~8 A 范圍內變化。輸出電壓經與負載串聯的小電阻采樣后, 送入ADC, 采樣值與預定值在單片機內部進行計算、比較輸出控制信號,對偏差值進行補償。利用軟件調整系統的非線性, 以降低實測值與設定值之間的偏差。
1.2 電源電路設計
(1) 數控部分核心
采用單C8051F , 控制數控直流源的鍵盤和顯示, 與D/A 轉換器和A/D 轉換器控制輸出電流。A/D 轉換器的基準電壓由專門±9 V 電源供電,D/A 轉換器的基準電壓由+20 V 電源供電, 由單片機送出數據經DAC 轉換輸出控制電壓。
(2) 運放OPA549 放大電路電流源。
OPA549 是BB 公司新推出的一種高電壓大電流功率運算放大器。它能夠提供極好的低電平信號、輸出高電壓、大電流, 可驅動各種負載。該器件的主要特點: 輸出電流大, 連續輸出電流可達8 A, 峰值電流可達10 A; 工作電壓范圍寬, 單電源為+8 V~+60 V, 雙電源為±4 V~±60 V; 輸出電壓擺動大;有過熱關閉功能, 電流極限可調; 有使能及禁止功能; 有過熱關閉指示; 轉換效率( 壓擺率) 最高為9 V/μs ; 工作溫度范圍為-40℃~+85℃。該器件主要應用于驅動工業設備、測試設備、電源、音頻功率放大器等大電流負載。
在該電源系統中, 主要為負載提供大電流, 采用PID 控制算法控制負載的發光強度。輸入為單片機經DAC輸出的控制電壓, 一路為比例放大電路, 如圖1 所示增益G=1+R3/R2.電流型DAC 通過R1 轉換成電壓, 控制OPA549 。輸出電流經采樣電阻轉換為采樣電壓, 送入A/D 轉換器反饋至單片機進行偏差值補償。
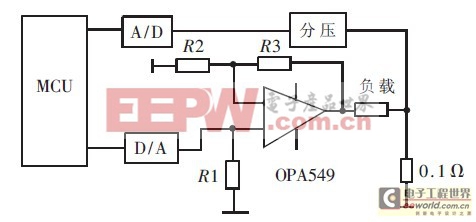
圖1 OPA549 構成可調大電流恒流源
(3) 散熱及抗干擾。
OPA549 大功率管工作時產生恒定的大電流, 功耗較大, 產生的熱量較多, 散熱成為該電源急需處理的問題。一般的軸流風扇內部電機置有脈沖驅動電路, 驅動時, 脈沖成分很容易直接順電機電源線“ 外溢” , 干擾其他電器設備。視頻設備上干擾表現為橫通斜線, 音響設備上產生噪音。為此, 安裝大面積的銅散熱片, 同時用風扇對設備中的電子元器件強制散熱。安裝風扇時, 需要在風扇電機電源線上串繞一只高頻磁環以抗干擾。串繞磁環有效濾除這些干擾成分, 一般只需繞上1~3 匝即可。
2 PID 控制算法
系統軟啟動的控制功能通過比例積分微分控制器實現。通過比較給定信號與反饋信號的偏差, 并進行比例、積分、微分等運算進行控制, 是技術較成熟、應用、廣泛的一種控制方式。其結構簡單、靈活性強、系統參數調整方便, 不需要求出模型。
PID 控制原理如圖2 所示。PID 控制是一種線性調節器, 它把設定值W 與實際輸出值相減, 得到控制偏差e 。偏差值e 經比例、積分、微分后通過線性組合構成控制量U, 對對象進行控制。其中比例調節器起到基礎調節作用, 主要對控制系統的靈敏度和控制速度有影響。積分調節器可以自動調節控制量, 消除穩態誤差,使系統趨于穩定。微分調節器可以減小超調, 克服振蕩, 同時加快系統的穩定速度, 縮短調整時間, 從而改善系統的動態性能。
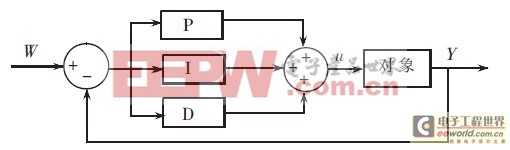
圖2 PID 控制原理圖
PID 控制器的輸出與輸入之間的關系可表達為:
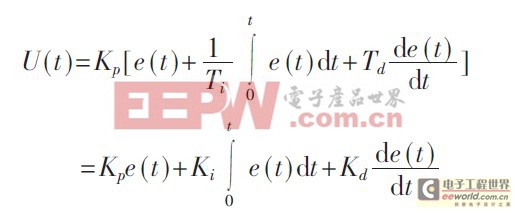
式中: Ti為積分時間常數; Td為微分時間常數; Kp為比例系數; Ki為積分常數, Ki=Kp/Ti ; Kd為微分常數,Kd=Kp/Td.
系統啟動時間較短, 啟動電壓、電流較大, 負載所承受的沖擊也較大, 致使啟動階段負載的動負荷峰值遠遠大于正常運行時的負荷, 容易造成負載的損壞。為解決此問題, 設計了一種新型的PID 控制軟啟動電源系統, 主要由電源、大電流恒流源、輸出大電流端采樣和控制系統組成, 并完成了實驗室內的試驗。當電源啟動時, 首先由單片機系統給定設定電壓、電流或功率。PID軟啟動是按負載線性上升的規律控制輸出。在負載電壓線性增加的過程中, 如果電流超出了所限定的范圍, 則馬上投入電壓閉環, 使電流值限定在所設定的范圍內后, 再線性逐漸增加電壓至額定值, 系統的光強也由零逐漸增大, 完成啟動過程。





評論