正弦逆變器控制軟件的設計

目前,正弦逆變器的控制通常采用模擬電路或數字電路實現。由于硬件的固有缺點和不能實施先進的控制策略,致使逆變器的性能不能極大的提高。隨著高速微處理器的問世,特別是具有高速運算、處理和控制能力的DSP的出現,使得對正弦逆變器采用新的控制方法成為可能。文中將重點介紹采用DSP實現正弦逆變器控制的方法。
1 全橋正弦逆變器
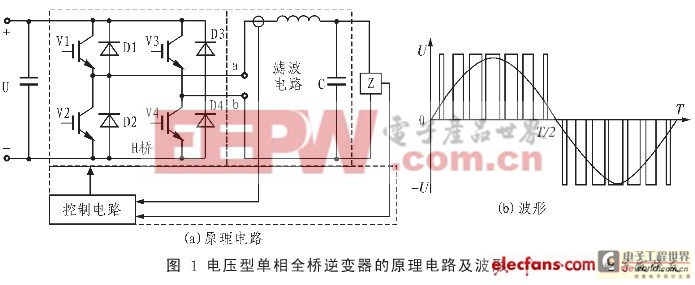
示出單相全橋逆變器的原理電路及波形。其中H橋和濾波電路完成直流到交流的變換,濾去諧波,獲得交流電;控制電路完成對H橋中開關管的控制,并使輸出交流電的電壓、頻率和波形穩定。
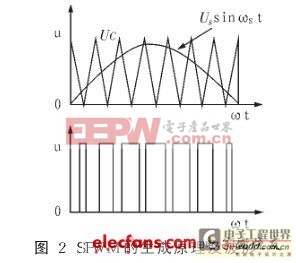
SPWM的生成原理及波形如圖2所示。由于采用正弦波調制波(Ussintωst)與三角波載波(幅值為Uc的正三角波,頻率為ωc)相交來獲得SPWM波,因此,基波頻率為調制波的頻率,基波幅值與調制比M(M=Us/Uc)成正比關系,諧波含量少。正弦逆變器常采用SPWM控制,利用調制波控制輸出波形頻率,調整M來控制輸出電壓幅值。
工作時,H橋中Vl、V4在前半周期內以圖2中的SPWM信號閉合,V2、V3斷開;在后半周期內V1、V4斷開,V2、V3以SPWM信號閉合。故在整個周期內H橋輸出波形如圖1(b)所示。這樣,對該波形進行濾波,即可獲得頻率為ωs。,幅值正比M與調制比M的正弦交流電。
2 H橋控制方案和信號的數字化
2.1 控制方案
對逆變器的控制主要包括對SPWM的控制(即H橋開關管開關方式)和對SPWM脈寬的控制(即調整M,使輸出電壓穩定的反饋控制,一般采用平均電壓控制技術,即PI控制)二部分。
SPWM的控制方式可分為單極性和雙極性二種。在傳統的單極性或雙極性控制方式中,開關管均工作在高頻條件下,這樣雖然可以得到較理想的正弦輸出電壓波形,但也產生了較大的開關損耗,且頻率越高,損耗越大。
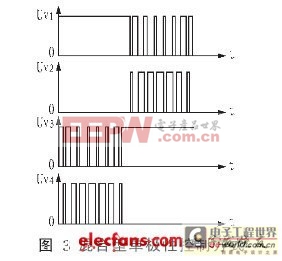
圖3所示的混合型單極性控制方式(HSPWM UVI~Uv4)波形分別對應圖1(a)中V1~V4.開關管的驅動信號)可較好地解決這一矛盾,既能得到理想的正弦波形,又能適當地減小開關損耗。在這種工作方式下.工作在較高開關頻率的2只功率管互補導通,得到理想的正弦波形,另外2只功率管工作在輸出基波頻率條件下,從而減小了開關損耗。
2.2 SPWM波生成數字化
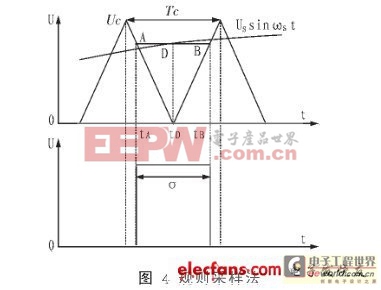
采用三角波作為載波的規則采樣獲得的SPWM波,在三角波零峰tD時刻對正弦調制波采樣得到D點,過D點作水平直線與三角波分別交于A點和B點,在A點的時刻tA和B點的時刻b間輸出高電平,其他時刻輸出低電平。根據三角關系,可以得出

其中σ為脈沖寬度。
逆變器控制信號中,調制波和載波頻率一定,tD時刻為n倍三角波周期(n=1,2,…,N。N=Ts/Tc,N為載波比,E為正弦波周期),如果一個周期內有Ⅳ個矩形波.則第n個矩形波的占空比D為:

2.3 PI調節器數字化
為模擬PI調節示意圖,可以計算出

離散化后整理可得:

3 基于DSP的控制軟件
實現逆變器控制主要依靠DSP的事件管理模塊和A/D轉換模塊。事件管理模塊由通用定時器f提供時間基準)、非對稱/對稱波形發生器、可編程的死區發生單元、輸出邏輯控制單元等組成,以實現SPWM波。A/D轉換模塊采樣輸人的平均電壓并轉換為數字信號。




評論