混合電動汽車能量流仿真的系統

對于混合電動汽車,在實際運行中,為了實現電動機與發動機之間的快速切換,要求系統有較短的響應時間;為了保證汽車運行的穩定性,要求系統具有精確的電流定位;同時,為了保證系統控制的可靠與準確,對系統采樣精度與控制速度的要求也較高。研究混合電動汽車的能量流控制策略,關鍵在于研究電池與電動機和發動機之間的關系。
本文引用地址:http://www.104case.com/article/230418.htm在實際工作中,混合電動汽車工作環境復雜、各種干擾因素的影響較大,給研究其能量流狀態帶來了較大的困難。能否在實驗室對動力電池的工作性能進行模擬與仿真呢?這樣,不僅可以節省大量的人力物力,而且對于混合電動汽車的設計和總成有很好的參照作用。
本文將介紹的混合電動汽車能量流仿真系統就是針對上述要求而設計的,該系統可仿真混合電動汽車的實際工作環境,為研究混合電動汽車控制策略提供了一個靈活、簡便、高效的平臺。
系統特點
整個系統采用組合式平臺搭建,根據仿真工作的要求,按照工作電流的大小組合使用對應的仿真模塊來構成整個系統的能量控制部分。采用這種結構設計可以大大減小整個系統的體積與功耗。
系統中集成了CAN2.0B和RS-232C接口,可以與汽車內的各種控制儀表進行通信與數據交換,與汽車總控系統的標準通信接口兼容,能夠方便的移植到實際的混合電動汽車系統中。同時,可以直接與計算機通信,由計算機來控制系統的運行,便于實現監控與仿真。
系統結構
混合電動汽車能量流仿真系統主要由充電系統、放電系統和控制系統三個部分組成。系統結構框圖如圖1所示。
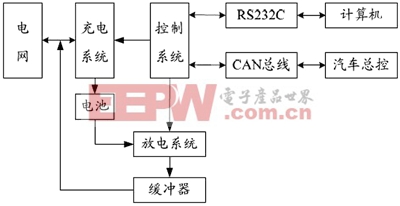
圖1 仿真系統結構
在充電系統中,采用高效率的脈寬調制方式(PWM),同時采用反饋穩定控制系統,使得充電過程快速穩定。
在放電系統中,采用節能型的能量回饋方式,將電能返回電網或者仍然回到充電系統,達到節能降耗的目的。
在控制系統中,采用高速嵌入式微處理器,具有抗干擾能力強、響應速度快、控制方式靈活的特點。
1 充電系統
首先將電網電壓進行整流,經過脈沖寬度調制,再經過隔離變壓器變換,然后進行整流穩壓,即可得到所需的工作電壓。為了保證充電過程的快速穩定,將電壓、電流采樣值引入穩定控制系統,使得充電過程快速穩定。充電系統結構如圖2所示。
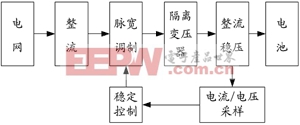
圖2 充電系統結構

評論