基于VHDL的直流電機(jī)控制功能模塊設(shè)計(jì)

1 直流電機(jī)總體硬件設(shè)計(jì)
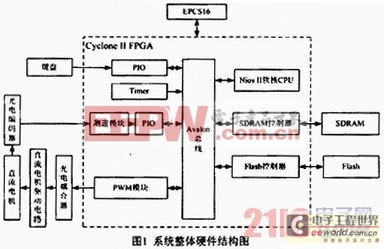
如圖1所示,系統(tǒng)整體由FPGA芯片控制,其控制核心為ALTERA公司的NiosII軟核CPU,本文將著重介紹圖中兩個(gè)控制功能模塊PWM模塊和測(cè)速模塊的設(shè)計(jì)與生成。這兩個(gè)控制功能模塊均采用VHDL硬件描述語(yǔ)言自行設(shè)計(jì)生成可以調(diào)用的IP核,通過QuartusII對(duì)其進(jìn)行編譯、仿真驗(yàn)證其正確性,最后將生成自定義接口功能模塊添加到頂層原理圖中,完成整個(gè)調(diào)速系統(tǒng)的設(shè)計(jì)。
2 PWM功能模塊的設(shè)計(jì)
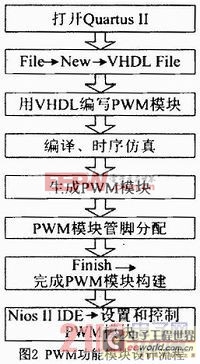
PWM模塊利用直流電機(jī)占空比來控制電機(jī)電樞電壓,從而控制直流電機(jī)的轉(zhuǎn)速。設(shè)計(jì)過程如圖2所示。
PWM功能模塊的仿真波形如圖3所示。
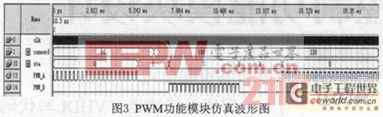
從圖3可以看出,仿真時(shí)給定一個(gè)時(shí)鐘信號(hào)Clk,Sta用來控制直流電機(jī)正反轉(zhuǎn),圖3中的0表示直流電機(jī)處于正轉(zhuǎn)狀態(tài),1表示停止,3表示反轉(zhuǎn);Conword為占空比信號(hào),仿真中有25%、78%、50%三種值;PWM A表示直流電機(jī)處于正轉(zhuǎn)狀態(tài)時(shí)的占空比輸出,這時(shí)PWM B的輸出為0;PWM B表示直流電機(jī)處于反轉(zhuǎn)時(shí)的占空比輸出,此時(shí)PWM A的輸出值為0;而當(dāng)電機(jī)處于停止?fàn)顟B(tài)時(shí),如圖中當(dāng)Sta值為1時(shí),PWM A和PWM B的輸出值均為0。經(jīng)仿真時(shí)序圖驗(yàn)證此設(shè)計(jì)是有效的,從而將其生成PWM功能模塊。
PWM功能模塊如圖4所示。
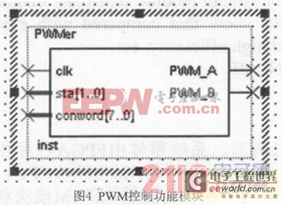
PWM控制功能模塊的原理如下:將時(shí)鐘源50MHz的基頻信號(hào)64分頻,作為PWM模塊的基頻信號(hào),以256個(gè)該基頻脈沖信號(hào)作為PWM輸出的一個(gè)周期,由NiosII處理器給出Conword的值指定一個(gè)PWM周期內(nèi)高電平持續(xù)時(shí)間,改變Conword的值即刻改變占空比輸出的值。Sta用來控制電機(jī)正反轉(zhuǎn)。
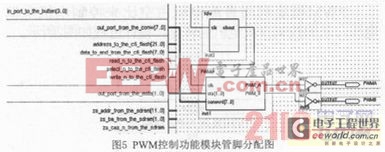
PWM控制功能模塊管腳分配圖如圖5所示。
3 測(cè)速功能模塊的設(shè)計(jì)
測(cè)速模塊的作用主要是利用基頻的周期來計(jì)算光柵信號(hào)的周期,算出直流電機(jī)的轉(zhuǎn)速。其設(shè)計(jì)的流程圖如圖6所示。
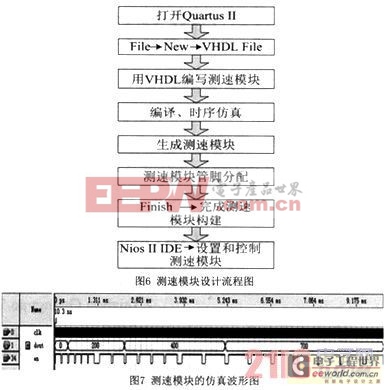
測(cè)速模塊的時(shí)序仿真波形圖如圖7所示。
從圖7中可以看出,仿真時(shí)給定一個(gè)時(shí)鐘信號(hào)Clk用于計(jì)時(shí),en為使能信號(hào),即表示光柵有效,dout表示光柵有效時(shí)間,仿真中有200、400、700三種值。通過時(shí)序仿真驗(yàn)證了此設(shè)計(jì)的測(cè)速模塊是有效的,從而將其生成測(cè)速功能模塊。
測(cè)速功能模塊如圖8所示。
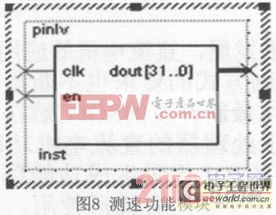
其工作原理如下:給出己知頻率的基頻,用光柵作為門限,測(cè)基頻脈沖的個(gè)數(shù),由基頻的周期來計(jì)算光柵信號(hào)的周期,再算出轉(zhuǎn)速,電機(jī)控制算法即根據(jù)測(cè)速模塊測(cè)出的速度進(jìn)行算法調(diào)整,達(dá)到閉環(huán)控制的效果。
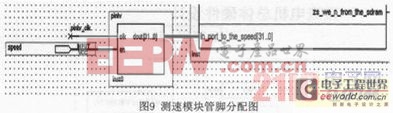
測(cè)速模塊的管腳分配圖如圖9所示。
4 結(jié)束語(yǔ)
根據(jù)直流電機(jī)的功能需求,利用VHDL語(yǔ)言設(shè)計(jì)了PWM功能模塊和測(cè)速模塊,并進(jìn)行了仿真,驗(yàn)證了設(shè)計(jì)的正確性,完成了系統(tǒng)設(shè)計(jì)。本文的創(chuàng)新之處在于利用軟硬件直接設(shè)計(jì)控制功能模塊,這種設(shè)計(jì)具有開發(fā)周期短、通用能力好、易于開發(fā)擴(kuò)展等優(yōu)點(diǎn),值得推廣。








評(píng)論