機(jī)頂盒中智能卡通信的實(shí)現(xiàn)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢
張 萍
(電子科技大學(xué) 電子工程學(xué)院,四川 成都 610054)
摘 要:機(jī)頂盒中采用智能卡技術(shù)實(shí)現(xiàn)條件接收,主要介紹了機(jī)頂盒芯片Sti5516的智能卡接口和用于實(shí)現(xiàn)機(jī)頂盒與智能卡之間通信的TDA8004T芯片,介紹了T=0通訊協(xié)議,并給出了通訊的實(shí)現(xiàn)過(guò)程。
關(guān)鍵詞:機(jī)頂盒 智能卡 T=0協(xié)議
在利用數(shù)字機(jī)頂盒收看數(shù)字電視節(jié)目時(shí),為了滿足不同用戶的需要,保證每個(gè)用戶的利益,需要采用條件接收系統(tǒng)管理用戶的權(quán)限并確保用戶的正常收看。而在機(jī)頂盒中,通常使用智能卡技術(shù)實(shí)現(xiàn)條件接收。
智能卡有自己的微處理器、存儲(chǔ)器和一個(gè)與機(jī)頂盒通信的接口。采用智能卡實(shí)現(xiàn)條件接收的優(yōu)勢(shì)在于:它具有高度的安全性和保密性,主要用于存儲(chǔ)用戶的私人密鑰、控制授權(quán)、保密算法等信息,可以保證整個(gè)數(shù)字電視系統(tǒng)的安全。
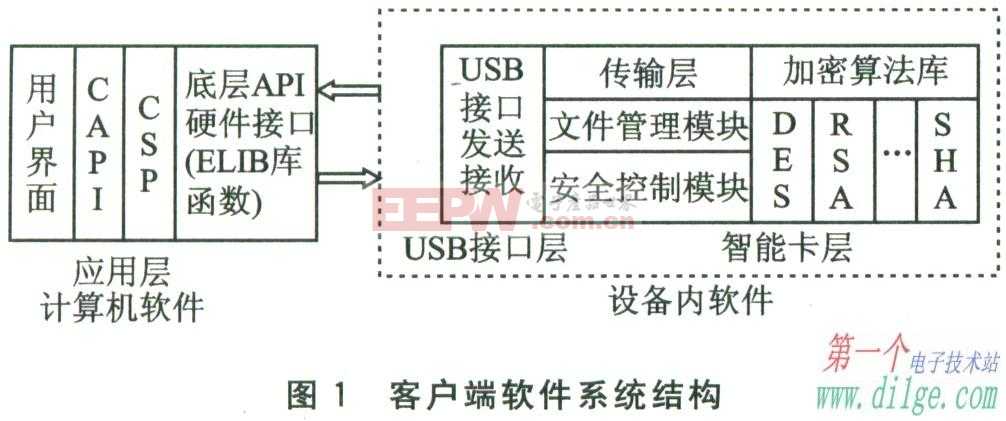
本文主要討論智能卡與機(jī)頂盒之間的通信。機(jī)頂盒中的主芯片一般都提供與智能卡通信的接口,利用相應(yīng)的硬件和通信協(xié)議,就可以實(shí)現(xiàn)它們之間的正常通信。在本文中,機(jī)頂盒芯片采用ST公司的Sti5516。由于Sti5516提供的智能卡接口需要外接一個(gè)接口芯片才能與智能卡通信,所以還采用了Philips公司的TDA8004T芯片。整個(gè)硬件框圖如圖1 所示。

圖1 機(jī)頂盒與智能卡通信的硬件框圖
1 Sti5516的智能卡接口
Sti5516支持智能卡接口——異步收發(fā)控制器(UART),用于實(shí)現(xiàn)Sti5516與二個(gè)智能卡控制器的通信。異步收發(fā)控制器支持全雙工異步通信,接收器與發(fā)送器使用相同的數(shù)據(jù)格式和波特率。數(shù)據(jù)的傳輸和接收可以是雙BUFFER,也可以是16位FIFO。通信過(guò)程中奇偶校驗(yàn)位、數(shù)據(jù)位、停止位都是可編程的。同時(shí),在傳輸和接收中的錯(cuò)誤覺(jué)察增強(qiáng)了數(shù)據(jù)傳輸?shù)姆€(wěn)定性,UART與智能卡的握手協(xié)議確保了數(shù)據(jù)傳輸?shù)陌踩浴ti5516有一個(gè)智能卡時(shí)鐘產(chǎn)生器,提供給智能卡一個(gè)時(shí)鐘信號(hào)。智能卡使用這個(gè)時(shí)鐘驅(qū)動(dòng)智能卡與UART之間的通信。這個(gè)時(shí)鐘也用于智能卡CPU時(shí)鐘。智能卡接口操作要求卡的時(shí)鐘可以調(diào)整,這樣波特率可以改變,時(shí)鐘的調(diào)整可以根據(jù)ISO7816標(biāo)準(zhǔn)。Sti5516提供的智能卡接口支持T=0、T=1協(xié)議。
2 TDA8004T介紹
TDA8004T提供了一個(gè)低成本的異步智能卡接口,可用于電子付費(fèi)、讀卡器、付費(fèi)電視等。它可以取代智能卡與微控制器之間的一些外部元器件,提供微控制器與智能卡之間穩(wěn)定、低噪音并符合ISO-7816 標(biāo)準(zhǔn)的通信接口[1]。其原理結(jié)構(gòu)圖如圖2所示。

圖2 TDA8004原理結(jié)構(gòu)圖
3 通信協(xié)議
在Sti5516與智能卡的通信過(guò)程中,本文采用了T=0協(xié)議。
T=0協(xié)議是異步半雙工字節(jié)傳輸協(xié)議[2],即協(xié)議所處理的最小單位是單個(gè)字節(jié)。通信命令總是由接口設(shè)備啟動(dòng),以命令報(bào)頭通知卡做什么,并且允許在卡發(fā)出的過(guò)程字節(jié)的控制下傳輸數(shù)據(jù)字節(jié)。命令報(bào)頭由連續(xù)的5個(gè)字節(jié)組成,這5個(gè)字節(jié)指定為CLA、INS、P1、P2、P3。其中CLA為指令類別,INS為指令類別中的指令代碼,P1、P2為一個(gè)完成指令代碼的參考符號(hào)(例如地址),P3由一個(gè)可變長(zhǎng)度的條件體組成。條件體包括命令數(shù)據(jù)域長(zhǎng)度字節(jié)Lc、命令數(shù)據(jù)域和響應(yīng)返回的最大長(zhǎng)度字節(jié)Le。根據(jù)不同的命令,條件體的組成也不相同。
這樣,在一個(gè)5字節(jié)命令報(bào)頭傳輸后,接口設(shè)備等待一個(gè)或者兩個(gè)過(guò)程字節(jié)。過(guò)程字節(jié)的值將指明接口設(shè)備請(qǐng)求的動(dòng)作。如果過(guò)程字節(jié)的值與INS字節(jié)相同,表示接口設(shè)備向卡發(fā)送或者從卡接收所有數(shù)據(jù);如果與INS字節(jié)的補(bǔ)碼相同,表示接口設(shè)備向卡發(fā)送或者從卡接收下一個(gè)字節(jié);如果為0x60,表示延長(zhǎng)等待時(shí)間;如果為0x61,表示接口設(shè)備等待第二個(gè)過(guò)程字節(jié),并根據(jù)第二個(gè)過(guò)程字節(jié)發(fā)送命令取回?cái)?shù)據(jù);如果為0x6c,表示接口設(shè)備等待第二個(gè)過(guò)程字節(jié),并根據(jù)第二個(gè)過(guò)程字節(jié)重發(fā)上一條命令。如果過(guò)程字節(jié)是0x90、0x00,表示通信成功完成[2~3]。
4 通信的實(shí)現(xiàn)
在實(shí)際通信過(guò)程中,本文將工作頻率定為3.57MHz,保證數(shù)據(jù)傳輸?shù)牟ㄌ芈蕿?600bps。數(shù)據(jù)格式采用帶奇偶校驗(yàn)的8個(gè)數(shù)據(jù)位和2個(gè)停止位,如圖3所示。

圖3 數(shù)據(jù)格式
在機(jī)頂盒與智能卡發(fā)送數(shù)據(jù)和接收數(shù)據(jù)的過(guò)程中,使用了Sti5516智能卡接口UART的驅(qū)動(dòng)。因此在進(jìn)行通信之前首先要對(duì)UART初始化。初始化之后,進(jìn)行卡的復(fù)位應(yīng)答,如果應(yīng)答正確才能與卡通信。
根據(jù)T=0協(xié)議的定義,機(jī)頂盒與智能卡通信的流程圖如圖4所示。

圖4 機(jī)頂盒與智能卡通信的流程圖
5 調(diào)試經(jīng)驗(yàn)
(1) 在寫智能卡接口UART的驅(qū)動(dòng)時(shí),必須按照T=0協(xié)議標(biāo)準(zhǔn)配置工作頻率、數(shù)據(jù)傳輸波特率和數(shù)據(jù)格式;
(2) 在確保卡的復(fù)位應(yīng)答正確后,才能進(jìn)行卡與機(jī)頂盒的通信;
(3) 命令報(bào)頭的傳送一般是有一定的先后順序的,在測(cè)試過(guò)程中,需要按照順序發(fā)送命令報(bào)頭,才能正常接收數(shù)據(jù);
(4) 判斷過(guò)程字節(jié)和條件體形式時(shí),一定要按圖4所描述的,考慮仔細(xì)、全面,以免通信錯(cuò)誤。
由于目前大多數(shù)智能卡支持T=0協(xié)議,所以本文主要介紹了基于T=0協(xié)議的機(jī)頂盒與智能卡之間的通信。在此基礎(chǔ)上,以后可以實(shí)現(xiàn)基于T=1協(xié)議的通信,以便支持更多的智能卡。
參考文獻(xiàn)
1 TDA8004T Data sheet. Product specification,1999 Dec 30,Philips
2 GB/T 16649.3 -1996 識(shí)別卡-帶觸點(diǎn)的集成電路卡-第3部分: 電信號(hào)和傳輸協(xié)議.ISO/IEC 7816-4:
1995識(shí)別卡-帶觸點(diǎn)的集成電路卡-第4部分:交換用行業(yè)間指令
3 Wolfgang Ranki, Wolffang Effing編著, 王卓人,王鋒編譯.智能卡大全-智能卡的結(jié)構(gòu)功能應(yīng)用.
北京:電子工業(yè)出版社,2002


評(píng)論