基于分布式的逆變電源并聯控制技術

逆變電源的并聯技術是提高逆變電源供電可靠性和擴大供電容量的重要技術手段。當前大容量的逆變電源的發展趨勢是采用新型全控高頻開關器件構成逆變電源模塊單元,再通過多個模塊并聯進行擴容。這樣可以提高逆變電源模塊的通用性和靈活性,使系統設計、安裝、組合更加方便,同時增加系統的冗余性和可靠性。交流電源間的并聯遠比直流電源并聯運行復雜,由于其正弦波輸出,逆變電源的并聯需要滿足5項條件,即相同的電壓、頻率、波形、相位和相序,只有這樣才能消除環流、均分負載功率,達到最佳的運行狀態,真正實現逆變電源并聯。
目前,逆變電源并聯控制方式一般分為集中控制、主從控制、分布式控制、3C控制和無互連線獨立控制5種控制策略。
在現有的各種控制方式中,集中控制、主從控制在實際應用中都有一定的應用,但由于并聯控制電路故障可能會引起整個系統故障停機,所以應用受到一定的限制。3C控制實際上是對分布式控制的一種改進,而無互連線控制與實際應用有一定的差距,所以分布式控制相對有一定的優勢。
1 分布式控制并聯控制策略
1.1 分布式控制的概念
分布式控制技術又稱分散邏輯控制,將系統的各個中心環節的控制權進行分散化和獨立化,實現系統中各個單元的獨立工作。這種控制方式可實現真正的冗余并聯,有1個模塊故障退出時,并不影響其他模塊的并聯運行;可靠性高、危險性分散、功能擴展容易等良好的特性已在眾多領域中得到了廣泛應用;成為計算機系統發展的主要方向之一,是一種比較完善的分布式智能控制技術。
1.2 分布式并聯的控制原理
逆變電源并聯控制策略中,集中控制和主從控制都可能因為部分電路故障而使整個系統故障停機。分布式并聯控制[1]策略可解決該問題,在各逆變電源中綜合每個電源模塊的電流及頻率信號,得出各自頻率及電壓的補償信號,該方式能實現真正的N+1運行模式。
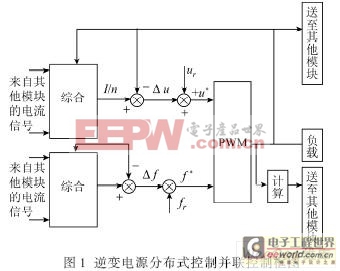
各模塊并聯控制單元檢測相應模塊的市電頻率和相位,給其他各電源模塊發出同步脈沖,無市電時,同步脈沖有晶振產生,各個逆變電源的鎖相環電路用來保證其輸出電壓頻率和相位與同步總線脈沖信號同步。并聯控制單元將其他模塊單元負載電流與本機負載電流作比較,求出電流偏差,并將其作為電壓指令的補償量發送給每個逆變電源單元,以消除各模塊輸出電流的不平衡。控制綜合部分的均流及同步原理如圖1所示。
1.3 并聯系統控制方案
在目前所見的文獻里,分布式控制并聯方案主要包括有功無功控制和平均電流瞬時控制方案兩種。
1.3.1有功無功控制方案
有功和無功并聯控制,即功率偏差并聯控制。通過每個逆變電源單元檢測出本單元輸出的有功和無功的偏差值,以調節逆變電源單元輸出電壓的相位和幅值,保證每個逆變電源單元輸出的有功無功相等,達到均流的目的。
以2臺逆變電源模塊向同一負載供電為例進行簡單的分析,如圖2所示,其中X為線路阻抗,U0為并聯電網電壓。
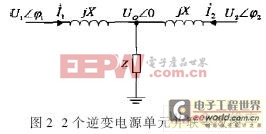

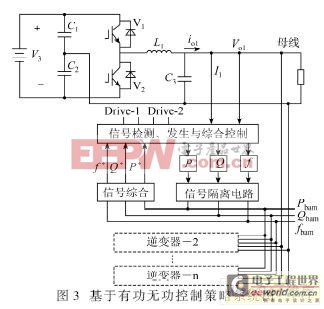
由式(5) 和式(6)可看出逆變電源的輸出有功的大小主要取決于功率角,而輸出無功功率則主要取決于輸出電壓的幅值,因此,可以通過改變逆變電源的輸出電壓幅值來控制無功功率,通過改變相位來控制有功功率,從而實現各輸出電源模塊的均流。 基于有功無功控制策略系統圖如圖3所示。
通過上述分析可得出這種控制策略的特點:
(1)采用3條并聯控制線:有功功率線、無功功率線、頻率線;
(2)各模塊之間地位一致, 可以實現真正的分布式冗余控制;
(3)并聯控制線屬于直流信號, 抗干擾能力較強;
(4)屬于平均值控制方式, 動態響應較差;
(5)有功、無功的計算量大。
1.3.2平均電流瞬時控制方案
平均電流瞬時控制方案一般通過鎖相環電路保證各模塊基準電壓的嚴格同步,通過求出各模塊輸出電流的瞬時平均值進行電流的調節,以達到均流的目的。
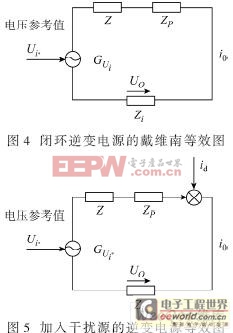
根據戴維南定理,1個逆變器可以用圖4所示的等效電路來表示,其中GUi是一個可控變電壓源,Z是逆變電源的輸出阻抗,Zp是連接逆變電源輸出端到負載的連線阻抗,Zl是負載阻抗。
在逆變電源并聯系統中,每個逆變電源都是一個電壓源,如果各個逆變電源完全一致,那么負載電流就會自動地平均分配到各個逆變電源模塊中去,然而實際電路中逆變電源的參數或多或少都會有偏差,這些參數偏差最終導致逆變電源的輸出電流有偏差。因此,可以把參數偏差當作是加于逆變電源輸出電流的一種干擾。為方便分析圖4所示等效圖,把所有參數偏差造成的影響集中起來并用一個干擾源id來表示,這樣均流問題就成為一個抗干擾問題,如圖5所示。
引入一個干擾源來代表所有誤差偏離,那么并聯逆變電源系統中各個逆變模塊就可以看成是一致的,如圖6 所示。
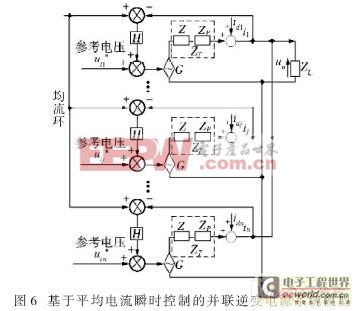


式(12)、式(13)展示了系統電壓調節和均流特,性系統是否穩定由式(12)、式(13)分母的根的位置決定。
基于上述分析可知該控制策略的特點如下:
(1)電壓基準、電壓反饋、電流基準均為各并聯模塊相應信號的平均值,并聯后系統的動靜態性能不低于單模塊設計性能,且不需附加額外的并聯控制模塊;
(2)各個模塊之間地位一致, 可以實現真正的分布式冗余控制;
(3)并聯方法模塊間的模擬信號線較多,不適于遠距離通信,易受干擾;
(4)并聯控制電路復雜,可靠性降低。
2 結論
基于分布式的逆變電源并聯運行不僅可以滿足容量擴充的要求,也可組成并聯冗余系統,提高運行的可靠性,同時也使整個系統具有極高的系統可維護性能,在逆變單元出現故障時,可方便地進行熱插拔更換或維修。本文對分布式并聯控制的常用方法進行了詳細的原理闡述和簡單的比較,指出了其優缺點,在實際應用中可以根據側重點進行選擇。




評論