一種基于分布式的逆變電源并聯控制技術及實現

通過上述分析可得出這種控制策略的特點:
(1)采用3條并聯控制線:有功功率線、無功功率線、頻率線;
(2)各模塊之間地位一致,可以實現真正的分布式冗余控制;
(3)并聯控制線屬于直流信號,抗干擾能力較強;
(4)屬于平均值控制方式, 動態響應較差;
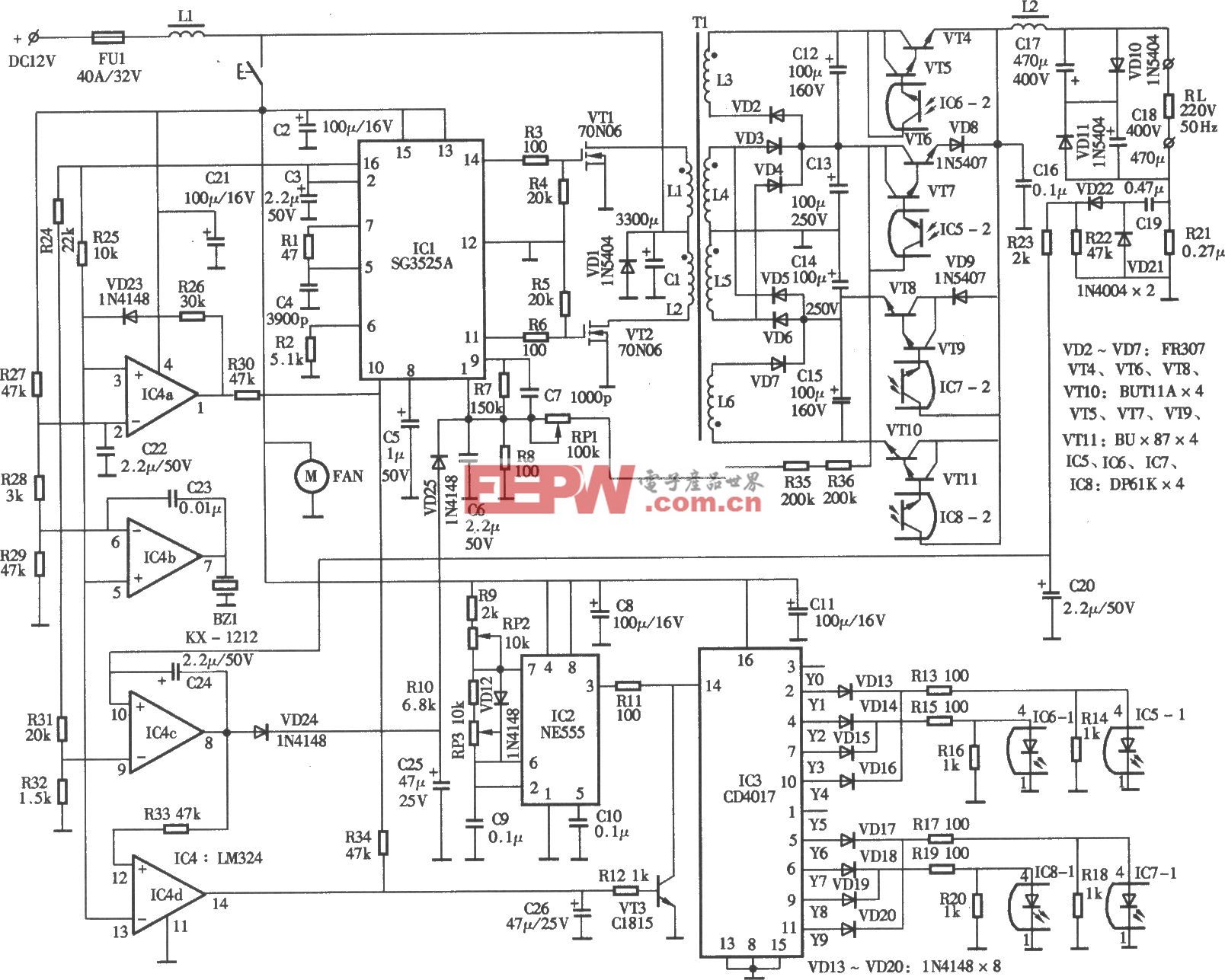
(5)有功、無功的計算量大。3.2、平均電流瞬時控制方案
平均電流瞬時控制方案一般通過鎖相環電路保證各模塊基準電壓的嚴格同步,通過求出各模塊輸出電流的瞬時平均值進行電流的調節,以達到均流的目的。
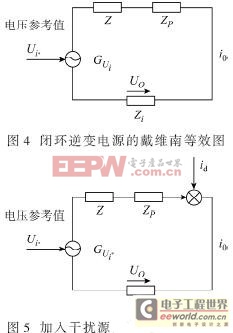
根據戴維南定理,1個逆變器可以用圖4所示的等效電路來表示,其中GUi是一個可控變電壓源,Z是逆變電源的輸出阻抗,Zp是連接逆變電源輸出端到負載的連線阻抗,Zl是負載阻抗。
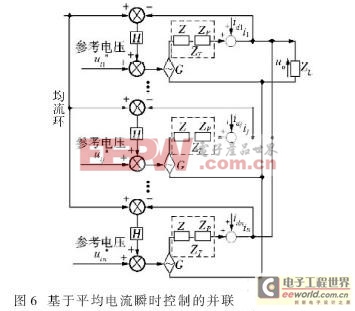
在逆變電源并聯系統中,每個逆變電源都是一個電壓源,如果各個逆變電源完全一致,那么負載電流就會自動地平均分配到各個逆變電源模塊中去,然而實際電路中逆變電源的參數或多或少都會有偏差,這些參數偏差最終導致逆變電源的輸出電流有偏差。因此,可以把參數偏差當作是加于逆變電源輸出電流的一種干擾。為方便分析圖4所示等效圖,把所有參數偏差造成的影響集中起來并用一個干擾源id來表示,這樣均流問題就成為一個抗干擾問題,如圖5所示。
引入一個干擾源來代表所有誤差偏離,那么并聯逆變電源系統中各個逆變模塊就可以看成是一致的,如圖6 所示。
式(12)、式(13)展示了系統電壓調節和均流特,性系統是否穩定由式(12)、式(13)分母的根的位置決定。


基于上述分析可知該控制策略的特點如下:
(1)電壓基準、電壓反饋、電流基準均為各并聯模塊相應信號的平均值,并聯后系統的動靜態性能不低于單模塊設計性能,且不需附加額外的并聯控制模塊;
(2)各個模塊之間地位一致,可以實現真正的分布式冗余控制,
(3)并聯方法模塊間的模擬信號線較多,不適于遠距離通信,易受干擾,
(4)并聯控制電路復雜,可靠性降低。
結論


評論