基于myDAQ的遠程多對象控制系統的設計方案


切換控制模塊主要采用AVR 單片機系列中ATmega8,ATmega8 是一款采用低功耗CMOS 工藝生產的基于AVR RISC結構的8位單片機,片內集成了較大容量的非易失性程序和數據存儲器以及工作存儲器。利用AVR 單片機的軟編程技術,在單片機FLASH 底層固化一個Bootloader程序,來引導遠程傳來的程序數據寫入FLASH應用區。本設計就是利用該原理設計的單片機切換程序。3.2 被控對象控制模塊設計
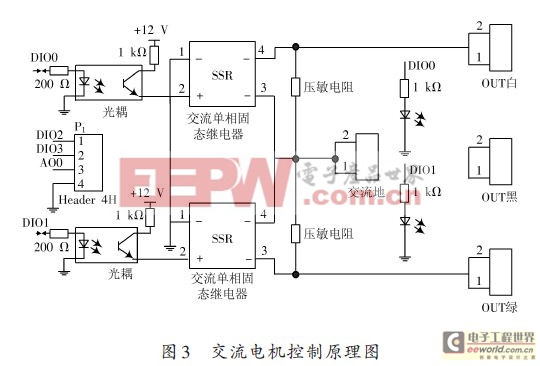
對于被控對象控制模塊,主要包括被控對象平臺板及被控對象(直流減速電機、交流電機、伺服電機、步進電機、倒立擺、電阻爐)控制模塊的設計。被控對象平臺板是將擴展板上分出的六路信號收集起來,然后在分至PCI口和拓展口。這里以交流電機的控制板設計為例進行說明。
交直流電機的控制主要有電機的啟動、停止;電機的換向;電機的變頻調速。其控制原理圖如圖3所示。
3.3 LabVIEW程序實現
編程實現采用LabVIEW 軟件進行編寫,這是一種圖形編程語言也叫G 語言[11].這一部分主要由實驗選擇切換界面、被控對象操作界面、攝像監控界面三部分組成。實驗選擇切換界面包括選擇實驗預覽按鈕和操作按鈕,選擇某一實驗預覽按鈕,將彈出實驗介紹圖片,便于用戶了解和學習實驗原理并預覽實驗效果圖。選擇相應被控對象開始試驗按鈕,則彈出對應不同被控對象控制板的LabVIEW 操作子VI.攝像監控界面利用LabVIEW 軟件自帶的工具包編寫然后嵌在每個被控對象控制程序里面。被控對象操作界面的編程設計是重點,倒立擺控制的操作界面如圖4所示。

4 遠程客戶端設計
實驗客戶端是運行在網絡終端的用戶計算機。因為控制平臺的程序都由服務器承載和執行,并且提供了相應的操作界面,任何連接在Internet上的PC機都可以使用瀏覽器登錄到網站進行遠程控制。
此時要求本地服務器端相關的LabVIEW軟件及VI程序是打開的。操作者進入運行界面后可選擇對應的被控對象控制臺進行遠程控制。當多個客戶端同時監控服務器端時,可以多個同時控制,但只能有一個客戶端有控制權,其他的需等待釋放后獲得控制權。
5 結論
本文的基于myDAQ的遠程多對象控制系統的設計方案, 該方案中的遠程控制系統成功的結合了單片機IAP技術、模擬開關技術以及LabVIEW 的Web 發布技術,實現了不拘于時間、地點、場地要求的多種被控對象遠程控制系統。用戶只需一臺聯網的普通PC 機即可完成相應功能。通過本系統一方面可以遠程控制現場的各種被控對象,另一方面通過攝像頭還可以對現場的運行狀況進行查看,增加了真實性。該系統已經通過了測試在學校范圍內穩定運行。而且底層平臺還具有很強的擴展性,用戶可以根據自己的需要在被控端添加其他的被控對象,簡單快捷、實用性高。


評論