基于姿態傳感器溫度補償方法的研究

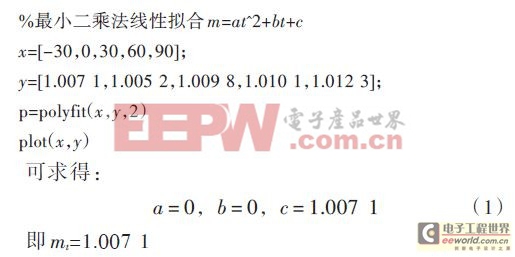
擬合圖像如圖3所示。
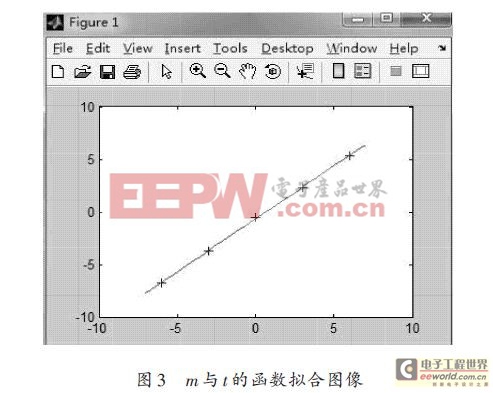
同理,求得n 與t 之間的函數關系式為:
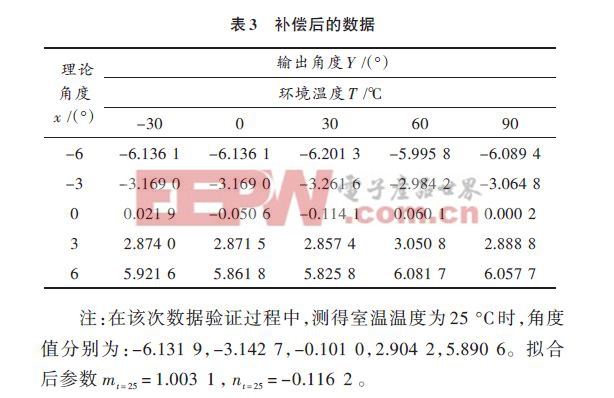
4 實驗數據的驗證
傳感器未經溫度補償時的輸出為y = mx + n ,即在t ℃時,無補償輸出為:

根據式(1)、(2)、(7)可得補償后的輸出值。償后的數據如表3所示。在表1中未補償前的最大誤差角度為0.682 7°,表3中補償后的最大誤差角度為0.261 6°,相對減少的誤差角度為0.421 1°。
5 結語
由表1和表3的數據對比結果可以看出,經過溫度補償后的姿態檢測精度相比補償前有了很大的提高。由此說明,在環境溫度變化的條件下,利用最小二乘法進行溫度補償,可以達到預期的效果,因此這種方法可以運用到工程實際中。
經緯儀相關文章:經緯儀原理

評論