電機逆變器死區補償獨領風騷高性能伺服不在話下

因此,在忽略功率開關引起的高頻噪聲的情況下,逆變器的輸出電壓為:
其中,ma調制度,為調制正弦波幅值與三角波載波幅值的比值。
由上式可知,由于逆變器死區時間的存在,不但使逆變器輸出電壓的基波發生變化,而且使輸出電壓中含有3次、5次、7次等高次諧波。
開關死區造成逆變器輸出電壓波形發生畸變,導致輸出電流波形波形畸變,即電流的交越失真。
·死區時間越長,逆變器輸出基波電壓損失越大,電壓波形畸變程度越大;負載基波電流幅值下降越多,電流波形畸變也越嚴重。
·對于確定的死區時間,負載功率因數變小時,會使逆變器輸出基波電壓幅值增加,電壓波形畸變率變小,基波電流幅值減小,電流波形畸變率變大。
·當輸出電壓較低時,空間電壓矢量幅值很小,三路橋臂相對導通時間變短,死區時間的影響變大。
·死區不僅影響輸出電壓幅值,還影響其相位;死區使pwm波形不再對稱于中心,因此,空間電壓矢量的幅值產生偏差,相位也發生變化。 基于位置的動態死區補償方法
各種死區補償方法的一個共同特點是根據電流波形補償電壓信號。因此需要檢測實際電流值,判斷各相電流正負,以其過零點作為補償電壓信號的切換時刻。電流檢測環節由電流傳感器、低通濾波器和a/d轉換組成,為減小噪聲程序中還需加數字濾波。檢測到的電流存在器件精度和干擾造成的誤差,且有相位延遲。因此利用實際檢測到的電流信號很難精確補償死區影響,甚至會由于過零點附近的錯誤補償造成更大的電流畸變。
現今pmsm的轉矩控制多是通過矢量控制實現的,為準確控制電機電流,其電流環響應頻率很高,可達到1khz以上,實際電流能夠精確跟蹤電流指令信號。在高精度的交流伺服系統中,為實現高精度的位置伺服控制需要高分辨率的位置傳感器,一般達到16或17位,而高速高精度a/d器件相對成本較高,其分辨率一般為10或12位。由于電流矢量和轉子位置相關,如果用位置信號判斷電流正負,施加電壓死區補償信號,補償的精度可以比實際使用的電流信號精度高,且不受干擾信號的影響。
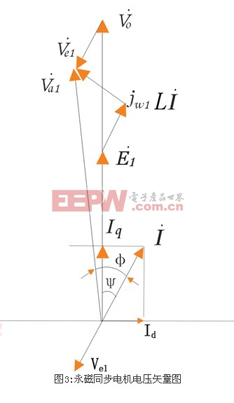
由pmsm矢量圖可見,磁場定向控制的電流矢量與轉子磁極成90°(電角度),并與轉子同步旋轉。轉子磁極的位置可通過高分辨率的編碼器確定,經過轉子磁場定向控制,電流按時間變化的電角度和磁極空間變化的空間旋轉角度重合,進而可得到電流矢量的空間位置。根據電流矢量的空間位置,可以判斷出各相電流的過零點。
磁極的位置角度與電流的相位關系固定,經過分析,我們按如下的位置變化規律進行電壓補償:
·當角度0《θ《π時,ia》0,a相補償正向電壓;反之補償反向電壓。
·當角度2π/3《θ《5π/3時, ib》0,b相補償正向電壓;反之補償反向電壓。
·當角度-2π/3《θ《π/3時, ic》0,c相補償正向電壓;反之補償反向電壓。
補償電壓的幅值計算公式為:

其中factor為調整系數,一般取為0.7。
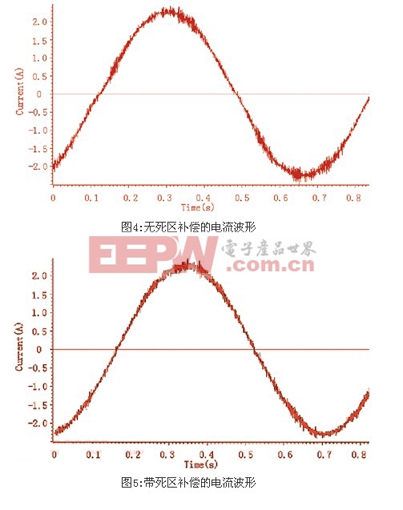
圖4和圖5為沒有加死區補償和加死區補償的實驗結果比較。由電流波形可以看出,無死區補償的電流在過零點處產生畸變,
有平的臺階。而加入以上提出的死區補償方法后,圖5所示實際電流跟蹤給定電流,得到了效果很好的正弦波形。
逆變器的開關死區效應對交流伺服系統的性能具有較大的影響,因此對開關死區進行校正補償是必要的。本文在分析了各種死區補償方法的基礎上,提出了一

逆變器相關文章:逆變器原理
逆變器相關文章:逆變器工作原理
伺服電機相關文章:伺服電機工作原理
脈沖點火器相關文章:脈沖點火器原理 矢量控制相關文章:矢量控制原理
評論