LED陣列照明驅動模型

引言
目前常用單顆大功率LED芯片的功率為1 W左右,要構建成更大功率的LED燈具,必須多顆LED芯片進行組合。LED發光的光通量與正向電流近似成線性關系,其光通量和色溫都被流經它的電流所控制。確保每個LED發光芯片有相同的亮度的一個有效的方法是采用多個LED連成一串。然而,這樣的一個主要問題是它們累積的電壓降限制了串聯的數量,限制了燈具功率擴大。另一方面,由于,LED的V/I特性的指數關系和LED正向壓降的負溫度特性,多個LED并聯將遇到各LED串的均流問題。
影響光通量和色溫的另外一個因素是溫度。在使用中,LED燈一旦被點亮,系統溫度會升高,隨之LED的正向電流會增大,電流的增大會使溫度更高。如果繼續這個循環,LED燈具最終會被燒毀。因此,LED燈串的電流控制和溫度控制在LED照明系統中顯得非常重要。
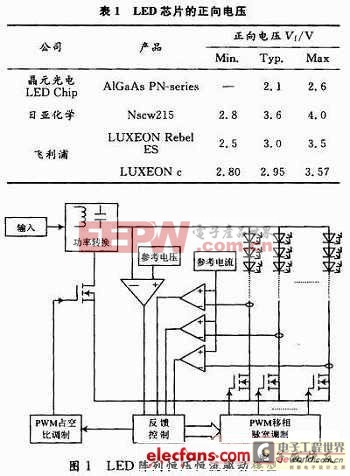
1 LED封裝芯片的正向電壓差異
由于LED封裝技術的復雜性,使LED芯片的最佳工作正向電壓(Vf)存在較大的差異。表1列舉了三家不同廠商產品的Vf值范圍,從表中可以看出,LED芯片的Vf值最大偏差可以達到40%,平均偏差也在20%左右。LED的正向電流與正向電壓成指數正變化關系,Vf的微小差異將造成LED正向電流的很大差異,從而影響LED正常照明。表中數據顯示如此大的誤差,故在照明驅動中不得不認真考慮這個問題。與驅動技術的發展相比,LED芯片制造和封裝上的改進往往更艱難。因此控制流經LED芯片的電流顯得更有意義。
2 大功率LED陣列燈具的驅動模型
有幾種方法驅動多個LED串并聯陣列,一個直接的方法直接用總線供電模式對多串LED芯片供電,參考文獻,這樣的模式沒有解決LED串電流的均等問題,對LED燈具的壽命和發光效果造成不利影響。圖1顯示的模型在調控總線電壓的基礎上,在每個LED串上連接一個電流調節器。通常,電流調節器可以是線性模式或開關模式。圖1采用開關模式,LED串總線電壓由前極開關變換模塊提供,每個LED串連接一個開關管,使LED串的電流受相移脈寬調制(Phase Shift Pulse Width Modulation,PS-PWM),其作用是:通過相位控制,確保各串電流脈沖無多串同時躍變;通過反饋控制,調整開關脈沖占空比,確保各串LED電流均等。一種PS-PWM調制電路的實現可參照。在圖1所示模型中,采用數字
控制芯片實現PS-PWM將更好。
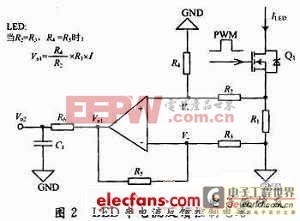
對LED串電流的取樣可用圖2所示的電路實現。取樣輸出值與串電流的比例關系如圖中等式所示。
數字控制芯片的工作性能在快速提高的同時,其成本也下降迅速。如Mieroehip公司的dsPIC33FJXXGSDSC系列芯片,TI公司TMS320F280xx系列芯片,其工作頻率都在幾十MHz,對100KHz級的開關頻率,可以實現在單開關周期內完成一次控制循環。在成本上,如TI公司的TMS320F2 802-7DAT官網報價(2010年9月)為2.85美元,它集成了一個7通道12位ADC、8路PWM輸出模塊、一個模擬比較器,還有各種常用的通信接口。一塊芯片就可以實現驅動控制的大部分功能,在成本上有較大的優勢。
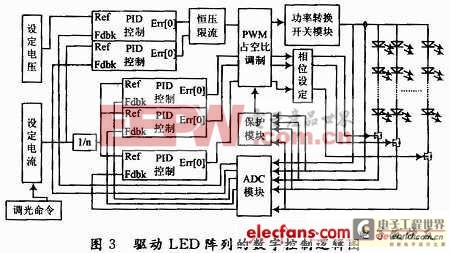
圖3是對圖1 LED陣列驅動結構的數字控制實現邏輯圖。其相位設定模塊、保護模塊與ADC模塊可以通過數字芯片的簡單設置來完成;PID控制、恒壓限流和PWM占空比調節模塊通過軟件編程實現。通過通信接口接收調光等命令,可以很方便的對LED照明進行亮度調節。由于控制結構是通過軟件實現的,給LED驅動的工作狀態檢測和其他功能擴展帶來了很大的靈活性。
4 數字控制邏輯的Matlab仿真
如圖4所示,為數字控制邏輯的仿真模型圖。其中:RL=105 Ω,RL1=100 Ω,RL2=95 Ω。
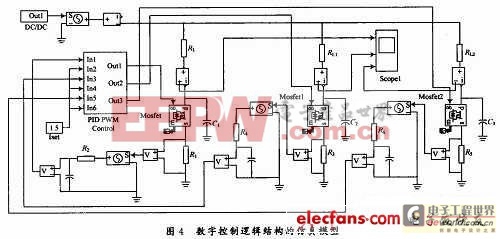
根據LED的V/I特性,當LED工作在Vf附近時,LED串可近似用純電阻代替。不同的電阻值表征各LED串總Vf的不同。
4.1 PID控制和PWM相移
LED串電流的PID控制主要包括:
(1)對輸出誤差信號進行PID運算,確保系統的穩定性;
4.2 仿真結果
如圖5所示,各串電流得到了較好控制,輸出電流脈沖的占空比大小從第1串到第3串依次減小,但其峰值依次增大,確保各串均值電流一致。

DC—DC模塊電壓和LED串電流的PID調節輸出如圖6所示,其過沖分別為2.4%和2.1%,效果較好。
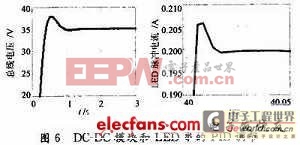
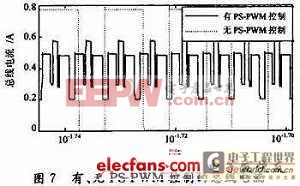
圖7顯示了無PS-PWM控制(虛線所示)和有PS-PWM控制的總線電流(實線所示)比較。從圖7中可以看出,無PS-PWM控制的總線電流脈沖跳躍幅度是有PS-PWM控制的3倍。即N串LED并聯時,通過PS-PWM調制可以使總線電流脈沖跳躍幅度減小到原來的1/N。
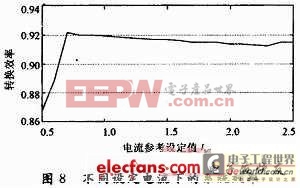
系統效率如圖8所示,Iset為PID模塊的輸入比較值,通過修改它,等效于對LED串調光,在大部分調光范圍內,其效率大于91%。
5 結語
由仿真結果可以看出,通過PS-PWM調制,總線電流跳躍幅度與沒有PS-PWM控制時相比,降低了2/3,減小了系統的EMI。通過對每串LED電流進行PWM占空比調節,較好的克服了由于LED芯片Vf的差異帶來的問題,同時維持了較高的效率。
(2)對輸出誤差調整值進行歸一化運算;
(3)歸一化后的調整值與幅值為1的鋸齒波比較,調節占空比輸出PWM脈沖;
(4)控制輸出脈沖相位。其中恒壓限流PID控制完成DC—DC輸出電壓和電流的雙環控制。
驅動相鄰兩串LED的PWM波形相差360°/N,N為LED串的并聯總數。如圖4為仿真模型中,N=3,則驅動第1到第3串的PWM波形初始相位分別為0°,120°,240°。







評論