一種大功率LED驅(qū)動(dòng)電路設(shè)計(jì)與實(shí)現(xiàn)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
20世紀(jì)90年代以來(lái),隨著氮化鎵基第三代半導(dǎo)體的興起,藍(lán)色和白色發(fā)光二極管的研制成功,具有高效、節(jié)能、環(huán)保、壽命長(zhǎng)等優(yōu)點(diǎn)的固體光源L ED發(fā)光二極管,真正點(diǎn)燃了綠色照明的光輝,被認(rèn)為是21世紀(jì)最有價(jià)值的新光源。但是,大功率L ED的電學(xué)離散性大,容易受溫度的影響,發(fā)光二極管導(dǎo)通后,加在L ED兩端的電壓稍有提高,就會(huì)引起流過(guò)L ED的電流急劇上升,嚴(yán)重時(shí)會(huì)使L ED長(zhǎng)期超過(guò)額定電流工作,容易使L ED的半導(dǎo)體芯片燒壞。要控制大功率L ED的亮度,驅(qū)動(dòng)器必須提供恒定的電流。大功率L ED恒流驅(qū)動(dòng)常用的有電阻限流、開(kāi)管變換器、專(zhuān)用芯片等。電阻限流方式控制方法簡(jiǎn)單,但是這種方法不能解決由于供電電壓波動(dòng)引起的光通量輸出變化問(wèn)題,而且能量損耗大,效率低,不能實(shí)現(xiàn)節(jié)能的目的。不少半導(dǎo)體廠家推出了大功率L ED專(zhuān)用驅(qū)動(dòng)芯片,取得了不錯(cuò)的效果,但是這種芯片價(jià)格普遍比較貴。針對(duì)現(xiàn)有驅(qū)動(dòng)電路的缺點(diǎn),該文提出了一種基于UC3843的峰值電流控制的大功率L ED恒流驅(qū)動(dòng)電路,該電路簡(jiǎn)單易用,控制方法簡(jiǎn)單,效率高,成本低;并對(duì)UC3843的外圍電路進(jìn)行優(yōu)化設(shè)計(jì),實(shí)現(xiàn)了PWM調(diào)光控制,避免了模擬調(diào)光帶來(lái)的色坐標(biāo)偏移問(wèn)題。其試驗(yàn)結(jié)果驗(yàn)證了該驅(qū)動(dòng)電路的可行性。
1 驅(qū)動(dòng)電路構(gòu)成及設(shè)計(jì)
大功率L ED是電流型器件,L ED 的亮度隨工作電流的增大而增大,為保證流過(guò)每只L ED的電流相同,使每只L ED的亮度均勻,采用L ED串聯(lián)。整個(gè)電路的結(jié)構(gòu)框圖如圖1所示。電流檢測(cè)為PWM控制電路提供反饋,與PWM控制芯片內(nèi)的誤差放大器的輸出信號(hào)進(jìn)行比較,實(shí)現(xiàn)對(duì)輸出脈沖占空比的控制,從而穩(wěn)定流過(guò)L ED的電流。PWMD是數(shù)字調(diào)光脈沖信號(hào)輸入,通過(guò)調(diào)節(jié)其占空比可以調(diào)節(jié)L ED的亮度,達(dá)到調(diào)光的目的。
采用的IC芯片UC3843是高性能固定頻率電流模式控制器,芯片有8個(gè)引腳,外電路接線(xiàn)簡(jiǎn)單,所用元件少,且性能優(yōu)越,成本低,芯片內(nèi)部具有可微調(diào)的振蕩器(能進(jìn)行精確的占空比控制) 、溫度補(bǔ)償?shù)膮⒖肌⒏咴鲆嬲`差放大器、電流取樣比較器。電壓調(diào)整率好,頻率響應(yīng)好,穩(wěn)定幅度大;具有低啟動(dòng)電流,帶滯后的欠壓鎖定,工作頻率可達(dá)500kHz ,大電流的圖騰柱式輸出,非常適合驅(qū)動(dòng)MOS場(chǎng)效應(yīng)管。
其內(nèi)部結(jié)構(gòu)方框圖如圖2所示。
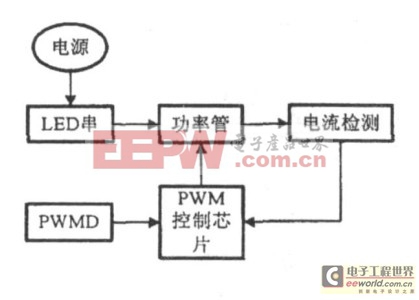
圖1 驅(qū)動(dòng)電路結(jié)構(gòu)框圖
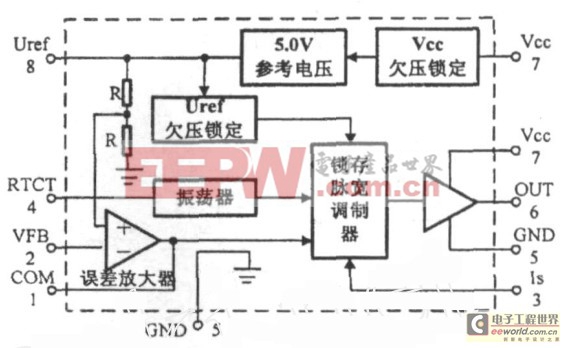
圖2 UC3843內(nèi)部結(jié)構(gòu)簡(jiǎn)化結(jié)構(gòu)框圖
1. 1 驅(qū)動(dòng)主電路設(shè)計(jì)
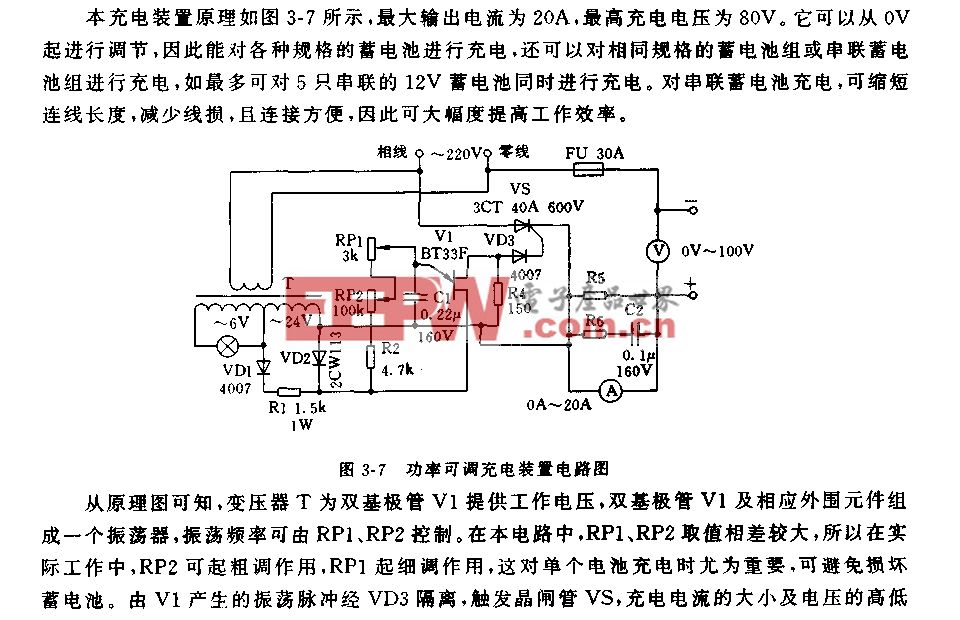
該電路主要由UC3843 ,MOSFET Q1 ,電感L1和大功率L ED串續(xù)流二極管D1及檢測(cè)電阻R12組成的BUCK型峰值電流控制模式電路,如圖3所示。利用引腳4所接的電阻電容R13和C9確定PWM的鋸齒波振蕩頻率;由R1 ,R2 ,電位器R3TL431 ,R4 ,R5 ,C3和UC3843內(nèi)部的誤差放大器組成電流檢測(cè)反饋的電壓基準(zhǔn)與電流檢測(cè)信號(hào)通過(guò)電流檢測(cè)比較器比較來(lái)控制PWM信號(hào)的占空比,限制流過(guò)L ED的電流峰值。由此可得流過(guò)L ED的電流峰值為:
Ipcak≈Is =(Vpin1- 1. 4V)/3R12(1)
式中,Vpin1為UC3843芯片1腳電壓, Ipcak為流過(guò)L ED的電流峰值, Is 為檢測(cè)電流峰值。
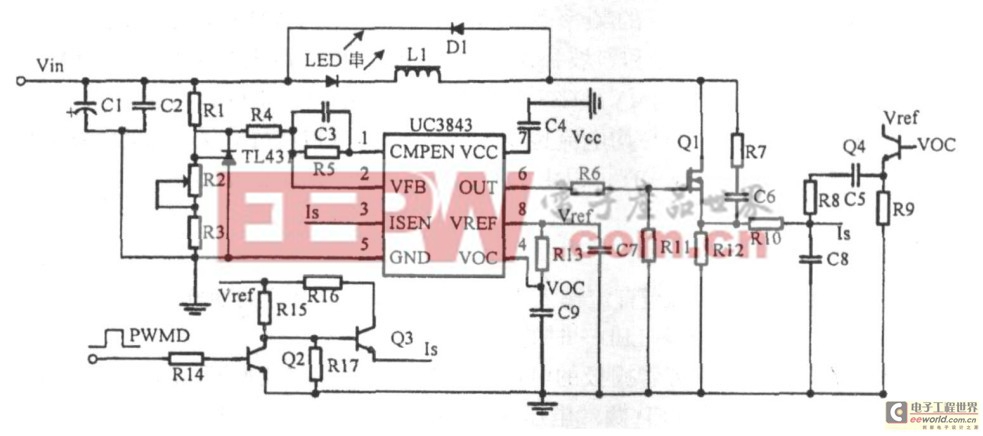
圖3 驅(qū)動(dòng)電路原理圖
1. 2 斜坡補(bǔ)償電路設(shè)計(jì)
CCM下電感L1中的電流iL波形如圖4所示,可得:
α=△IL/△I0=D/(1 - D)=m2/m1(2)
式中,Ue 為誤差放大器輸出電壓,m1、- m2為電路中iL的上升和下降斜率, △I0 為某個(gè)周期擾動(dòng)使iL初值產(chǎn)生的增量, △IL為該周期結(jié)束時(shí)iL的變化量。
可見(jiàn),要使系統(tǒng)穩(wěn)定,應(yīng)有△IL △I0,所以有D 0. 5 ;當(dāng)D > 0. 5時(shí),電路會(huì)出現(xiàn)次諧波振蕩,使電路不穩(wěn)定。消除諧波振蕩的技術(shù)是增加斜坡補(bǔ)償,即給Ic 增加一個(gè)負(fù)斜率的斜坡。增加斜坡補(bǔ)償后,新控制量斜率為- ma。增新的m′1= m1+ ma,新的m′2 = m2- ma,電感電流的波形如圖5所示,式2變?yōu)?
α=(m2- ma)/(m1+ ma)(3)
通過(guò)設(shè)計(jì)合理的ma,可以使|α| 1 ,即系統(tǒng)達(dá)到穩(wěn)定。一般取ma = 0. 75m2。
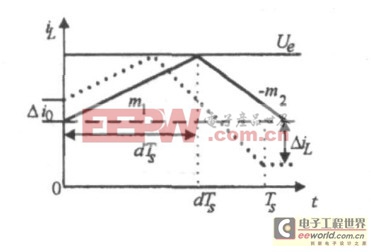
圖4 CCM模式下波形
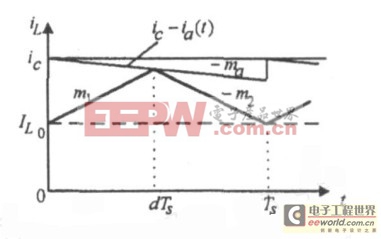
圖5 斜坡補(bǔ)償后波形
設(shè)計(jì)的斜坡補(bǔ)償電路采用CT上的峰峰值電壓信號(hào)作為斜坡補(bǔ)償?shù)妮斎胄盘?hào),圖3中斜坡補(bǔ)償網(wǎng)絡(luò)原理電路由晶體管Q4,R8 ,R9 ,R10 ,R12 ,C5 ,C8組成,C5 為交流耦合電容,隔離腳4輸出振蕩信號(hào)中的直流分量。為減小定時(shí)電阻R13和補(bǔ)償網(wǎng)絡(luò)之間相互影響,在振蕩器輸出和補(bǔ)償網(wǎng)絡(luò)輸入之間增加了一級(jí)射極跟隨器。R8和R10組成分壓網(wǎng)絡(luò),在UC3843的腳3獲得斜坡補(bǔ)償信號(hào),同時(shí)R10和C8組成尖峰電流吸收器,濾除尖峰干擾信號(hào)。斜坡補(bǔ)償信號(hào)和電流檢測(cè)信號(hào)在UC3843的腳3處求和,實(shí)現(xiàn)了斜坡補(bǔ)償。
1. 3 調(diào)光電路設(shè)計(jì)
在UC3843內(nèi)部,電流檢測(cè)比較器的反向輸入端被內(nèi)置的齊納二極管鉗位在1V ,只要芯片腳3上的電壓達(dá)到1V ,端6關(guān)閉,立即使MOS管Q1關(guān)斷。因此可以通過(guò)控制腳3的輸入電壓值改變一個(gè)周期內(nèi)流過(guò)L ED的平均電流來(lái)對(duì)L ED進(jìn)行調(diào)光控制。圖3中由R14 ,R15 ,R16 ,R17 ,Q2和Q3組成。為使人眼感覺(jué)不到燈光的閃爍,取PWMD信號(hào)的頻率為100~200HZ。當(dāng)PWMD信號(hào)為高電平時(shí), Q3 截止,UC3843的3腳的信號(hào)為電流檢測(cè)信號(hào)和斜坡補(bǔ)償信號(hào)之和,此時(shí)電路正常工作;當(dāng)PWMD信號(hào)為低電平時(shí),Q3 導(dǎo)通,加在3腳處的電壓超過(guò)1V ,UC3843的輸出端6立即使MOS管截止。當(dāng)PWMD信號(hào)的占空比變化時(shí),一個(gè)周期內(nèi)流過(guò)L ED的平均電流也發(fā)生變化,從而L ED輸出的光通量也發(fā)生變化,達(dá)到控制L ED亮度的目的。實(shí)際應(yīng)用中PWMD可以由具有PWM功能的簡(jiǎn)單的單片機(jī)產(chǎn)生。
2 試驗(yàn)結(jié)果
對(duì)設(shè)計(jì)出的驅(qū)動(dòng)電路進(jìn)行測(cè)試,當(dāng)直流輸入為9. 5V ,輸出峰值電流為300mA ,定時(shí)電阻R13為10k ,定時(shí)電容為1nF ,驅(qū)動(dòng)一只1W大功率L ED時(shí)的試驗(yàn)結(jié)果如下:當(dāng)PWMD引腳接高電平時(shí),開(kāi)關(guān)管柵極的電壓信號(hào)波形Vg(下方波形)和R12的電流檢測(cè)信號(hào)的波形Vs(CH1 ,上方波形)如圖6所示,L ED 兩端電壓Ve波形如圖7所示。實(shí)驗(yàn)結(jié)果基本符合理論值。
當(dāng)PWMD引腳接一頻率為100Hz ,占空比為50 %的脈寬信號(hào)時(shí),觀察到L ED的亮度明顯降低,開(kāi)關(guān)管柵極的電壓信號(hào)波形(CH1 ,上方波形)和流過(guò)限流電阻R12的電流檢測(cè)信號(hào)的波形(CH2 ,下方波形)如圖8所示。基本符合理論分析的結(jié)果,但是調(diào)光電路的瞬態(tài)響應(yīng)還不是很理想。
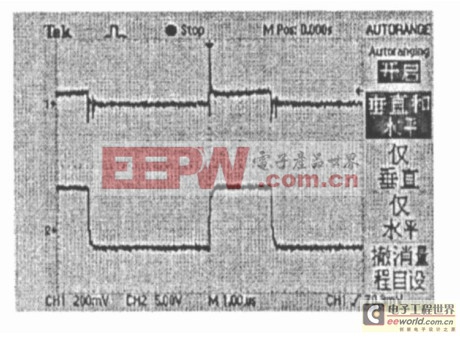
圖6 柵極電壓Vg和電流檢測(cè)信號(hào)Vs波形
圖7 L ED兩端的電壓Ve波形

圖8 柵極電壓和電流檢測(cè)信號(hào)波形
3 結(jié) 論
采用UC3843設(shè)計(jì)的大功率L ED驅(qū)動(dòng)電路可以克服因電壓不穩(wěn)所引起的發(fā)光強(qiáng)度的變化,整個(gè)電路結(jié)構(gòu)簡(jiǎn)單,響應(yīng)快速,穩(wěn)流性能好。通過(guò)PWM實(shí)現(xiàn)了調(diào)光控制,基本達(dá)到了設(shè)計(jì)要求。電路還存在不足,調(diào)光部分瞬態(tài)響應(yīng)不是很理想,還有待進(jìn)一步改進(jìn),下一步將著重做這方面研究。本電路可應(yīng)用于太陽(yáng)能照明系統(tǒng)中,也適用于AC/ DC的照明系統(tǒng)中。









評(píng)論