基于MSP430單片機的PID參數整定義

4 PID參數整定儀的軟件設計
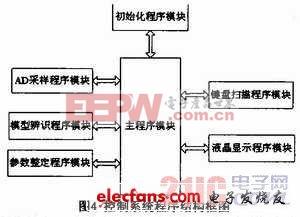
4.1 PID參數整定儀主要程序模塊
在工程實際應用中,不僅需要完成硬件的相關設計與測試,還必須根據需要進行軟件的設計和調試工作,所以在設計出符合要求的硬件電路的基礎上,還要進行軟件系統的設計和調試。本控制器軟件部分主要包括以下程序模塊。
(1)系統的初始程序模塊。用來進行系統的初始化,包括設定初始狀態值和參數,確定A/D初始工作參數,檢測主電路是否上電和是否允許系統啟動運行等等。
(2)鍵盤掃描程序模塊。讀取鍵盤輸入值,包括PID初始設定值、系統設定值及采樣時間等等。
(3)采樣程序模塊。用來對信號進行采樣,采樣過程要進行濾波,減少噪聲干擾對采樣數據的影響,最后檢測采集的數據是否包含了對象足夠多的信息,清除不合格的采樣數據,保證所采樣數據的質量。
(4)模型辨識模塊。根據采樣數據采用相關系數辨識法辨識出系統的數學模型,使辨識的模型與原模型有較好的線性相關度。
(5)參數整定模塊。根據辨識出的系統模型采用相關的整定算法計算出新的PID參數值。
(6)LCD模塊。將相關的數據,像設定值、整定模式以及PID的參數值等,顯示在液晶屏上。
整個系統的程序結構框圖如圖4所示。
上面模塊還要進行詳細劃分,每個模塊之間的耦合很少,這樣就可以獨立編程、調試,提高了軟件開發的模塊性。
4.2 PID參數整定儀的總體工作流程
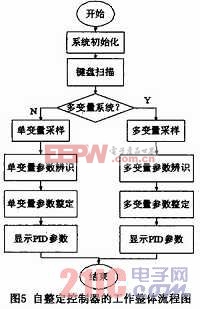
圖5是自整定控制器的工作流程圖,用戶輸入設定值,然后對過程的輸入量u和輸出量y進行采樣。對采樣的數據進行處理,并計算出最佳的PID參數整定值。整定具體過程如下:
(1)通過控制面板設定采樣時間及設定值以進行采樣。
(2)將采集的數據處理后得到辨識所需要的10~20個點。
(3)運用基于頻域的模型辨識算法對系統進行辨識,得到系統的模型。
(4)根據模型采用相應的辨識算法計算PID參數值。
(5)在LCD上顯示新的PID參數。
5 小結
介紹了本參數整定儀的各功能模塊,并且進行了硬件及軟件設計。此整定儀集單變量和雙變量整定功能于一身,適合于任何使用PID控制器的場合,不過只有在過程獲得平衡狀態時辨識方法才可使用。此整定儀整定出的PID參數在LCD上顯示。工作人員只需將整定出的新參數在系統中進行設置。此過程簡單實用,方便工作人員操作,并且由于設計小巧,便于工作人員隨身攜帶。

評論