基于MC9S08DZ60的AMT手柄ECU的設計

2.3 程序設計
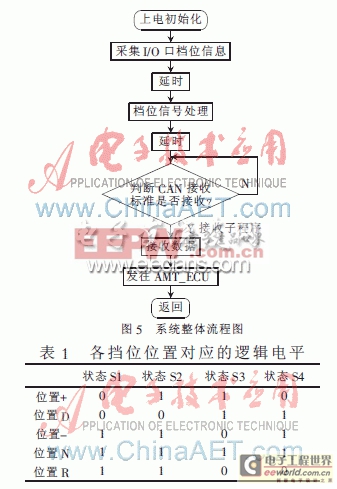
Initialize()完成單片機硬件初始化(手柄ECU初始化、應用程序初始化等)。上電初始化后,單片機開始采集I/O口擋位的電壓信號,并存儲到片上存儲單元。與主機的CAN通信將以中斷形式完成。圖5為系統整體流程。
各擋位位置對應的邏輯電平如表1。
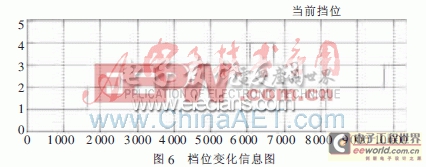
經過試驗,CAN總線傳送的擋位變化信息如圖6所示。
經試驗證明,該手柄ECU在實驗室條件下能夠實現數據采集和網絡通信,并達到換擋目標。采用CAN總線技術的手柄ECU不僅可以降低成本、實現數據共享,同時還可以提高AMT的性能。其最高1 Mb/s(40 m以內)的傳輸速度使得手柄ECU實時性好、可靠性高、運行情況良好。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理





評論