基于BC7281的墨斗操作臺系統設計

引言
隨著科技的發展,印刷行業開始從傳統的模擬生產轉向數字化生產,墨斗作為膠印機的核心著色裝置,其控制精度對膠印機的生產質量和自動化水平起著非常重要的作用。傳統的墨斗采用手動調整的方式,使得膠印機的生產質量較差,生產準備時間長,資源浪費嚴重。一種由墨斗操作臺控制系統、電機控制系統和上位機系統組成的墨斗控制系統在國外印刷行業得到了廣泛應用,這種新的墨斗控制系統能大大提高墨斗的控制精度,并縮短生產準備時間、降低生產成本。本文所描述的墨斗操作臺控制系統就是在跟蹤國際先進技術的基礎上,設計符合國內行情的產品,對提高國產膠印機的印刷質量和自動化水平有著重要意義。
1 墨斗操作臺控制系統介紹
一臺膠印機的墨斗系統通常由 2~4個墨斗(一個墨斗稱為一單元)、一個操作臺和一臺上位機組成,每個墨斗有一定數量的用于調節墨量的墨鍵,本系統中每個墨斗的墨鍵個數為 21。墨斗操作臺控制系統是整個墨斗控制系統中的一部分,是人和機器交互的接口,操作人員通過墨斗操作臺控制系統對墨斗的各個墨鍵進行控制,同時墨斗操作臺將墨斗各個墨鍵的位置信息、通訊狀態信息和各種故障信息顯示出來,墨斗操作臺控制系統結構圖如圖 1所示。顯示驅動與鍵盤掃描模塊由顯示驅動與鍵盤掃描電路和三組按鍵與顯示單元組成。每個墨鍵對應一組按鍵與顯示單元,如圖 2所示,下調按鍵用于調節墨鍵向墨量減少的方向移動,上調按鍵用于調節墨鍵向墨量增加的方向移動,鎖定按鍵用于鎖定墨鍵的位置,鎖定指示燈用于指示當前的鎖定狀態,數碼管和光柱用于指示當前墨鍵的位置(墨鍵的位置可為 0~99)。
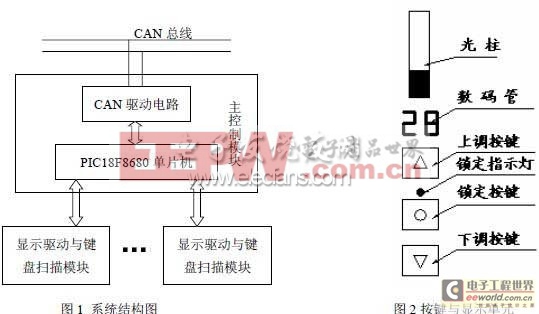
系統中數碼管為 7段數碼管,光柱由 20個 LED燈組成。整個操作臺有 21組按鍵與顯示單元,加上一些其它的總體控制按鍵,本系統需要控制 796個 LED(每個數碼管相當于 8個 LED)和 70個按鍵。
2按鍵與顯示單元墨斗操作臺控制系統工作時,需要與電機驅動系統和上位機系統配合才能調節各個墨鍵的位置,墨斗操作臺控制系統與其他系統之間通過 CAN總線進行通訊。
2 墨斗操作臺控制系統硬件結構
2.1 主控制芯片
墨斗操作臺控制系統采用微芯(Microchip)公司生產的 PIC18F8680單片機作為主控制芯片,PIC單片機采用哈佛總線結構和精簡指令集(RISC),其代碼壓縮率高、運行速度快、品種豐富,有高達 2MB的程序存儲器和 4KB的數據存儲器,高達 10MIPS的執行速度,帶優先級的中斷和 8×8單周期硬件乘法器 。其中的 PIC18F8680單片機具有如下特點:
1 )內部資源高度集成。PIC18F8680芯片內部集成了許多外圍模塊,SPI(串行外圍接口)通訊模塊,I2C(內部集成電路總線接口)模塊,符合國際標準ISO CAN的CAN模塊等,這些功能大大簡化了墨斗操作臺控制系統的外圍電路設計和軟件設計。
2 )驅動能力強。最大拉電流/灌電流可達 25mA。
3 )PIC18F8680芯片具有上電復位電路(POR)、上電延時定時器(PWRT)和看門狗電路(WDT)。這些電路大大提高了墨斗操作臺控制系統在復雜工業環境中的可靠性和穩定性。
4 )PIC18F8680芯片有 80個管腳,其中用戶 I/O口為 64個,這么多的用戶 I/O口便于主控制模塊控制大量的顯示驅動與鍵盤掃描模塊,從而方便墨斗操作臺控制系統以后的升級和擴展。
2.2 CAN總線通訊電路
CAN總線是控制器局域網的簡稱,主要用于過程檢測和控制,最早是在 20世紀 80年代提出,CAN總線是目前國際上應用最為廣泛的現場總線之一,目前已在汽車、航空,工業控制,測控系統、分布式系統等領域獲得了廣泛的應用。
CAN 總線采用多主站工作方式,根據優先權進行總線訪問仲裁。 CAN總線信號傳輸為 廣播式,所有節點都可以*到總線上的信號,信號內部包含傳輸地址,即標識符(Identifier),各個節點借助接收濾波器可以實現自動接收本節點的信息。錯誤檢測和自動隔離性能確保了總線正常工作。CAN總線傳輸數度快,可以達到 1M的波特率 。
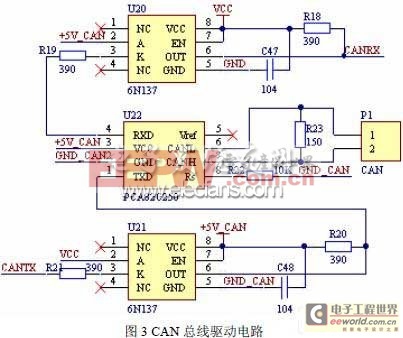
墨斗操作臺控制系統的 CAN通訊電路由 PIC18F8680單片機內部集成的 CAN總線控制器、CAN總線驅動器 PCA82C250和高速光電耦合器 6N137構成,在 CAN總線控制器和總線驅動芯片之間加入高速光電耦合,可以提高系統的可靠性和抗干擾性。
CAN驅動電路如圖 3所示,圖中標號為 CANTX和 CANRX的線分別與 PIC單片機的 CANTX管腳和 CANRX管腳相連。

評論