基于AVR單片機視覺智能尋跡車設(shè)計與實現(xiàn)方案

0 引 言
智能運輸系統(tǒng)是未來交通運輸系統(tǒng)發(fā)展的趨勢,智能汽車在智能運輸系統(tǒng)中扮演著十分重要的角色。作者提出智能尋跡車作為構(gòu)建未來智能交通運輸系統(tǒng)中重要部分,針對未來交通運輸系統(tǒng)有導(dǎo)航線的環(huán)境命題假設(shè)下智能汽車的自主尋跡問題,提出一種基于視覺的智能尋跡車模設(shè)計方案,作為該假設(shè)問題的解決方案。
基于視覺的智能尋跡車模設(shè)計方案能夠在線型復(fù)雜,轉(zhuǎn)彎半徑不確定性大的情況下,利用視覺自主尋跡前進(jìn),分級精確轉(zhuǎn)向。
1 系統(tǒng)總體設(shè)計
基于視覺的智能尋跡車模系統(tǒng)以AVR單片機MEGAl6為核心,由單片機模塊、路徑識別模塊、直流電機驅(qū)動模塊、舵機驅(qū)動模塊等組成,如圖1所示。
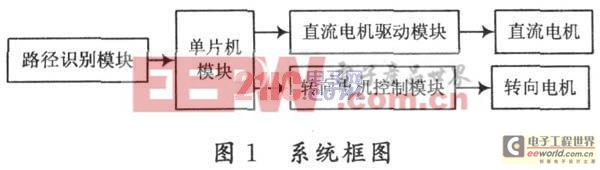
直流電動機為車輛的驅(qū)動裝置,轉(zhuǎn)向電動機用于控制車輛行駛方向。智能尋跡車模利用視覺在跑道上自主尋跡前進(jìn),分級精確轉(zhuǎn)向。道路為318 mm寬白色底板,其中間粘貼18 mm寬且線型不斷變化的黑膠帶。
2 硬件設(shè)計
2.1 控制模塊
尋跡車模采用AVR內(nèi)核的ATMEGAl6。該芯片能夠不需要外圍晶振和復(fù)位電路而獨立工作,非常適合智能尋跡車模的要求。控制器模塊安裝在廣東奧迪玩具實業(yè)有限公司生產(chǎn)的雷速登1:24比賽級遙控車模上。
2.2 路徑識別模塊
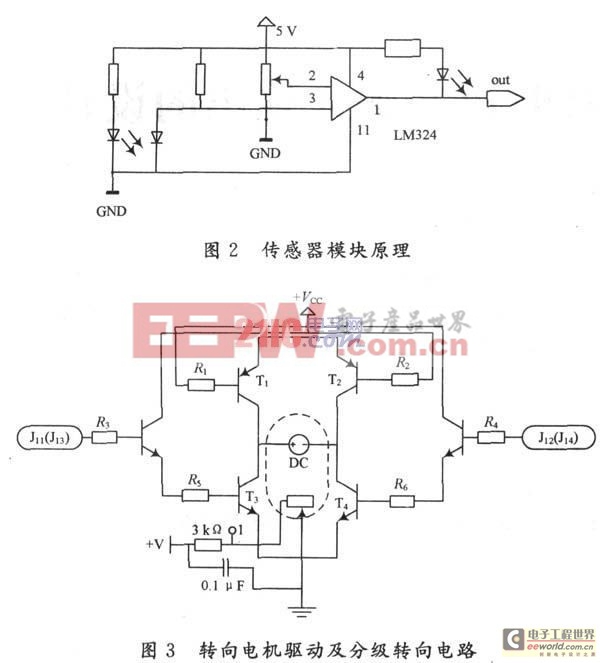
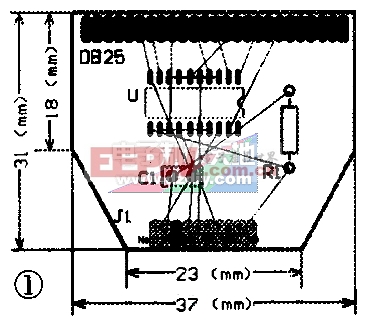
采用反射式光電傳感器來區(qū)分跑道上的黑色與白色,反射式光電傳感器有光線發(fā)射端和光線接收端,白底與黑線對發(fā)射端發(fā)出光線的反射度不同,從而影響接收端產(chǎn)生的電壓。用反射式光電傳感器、可調(diào)電阻和運算放大器LM324組成傳感器模塊,如圖2 所示。實現(xiàn)在不同賽道上輸出高低電平,自主尋跡。
2.3 轉(zhuǎn)向電機和驅(qū)動電機驅(qū)動模塊
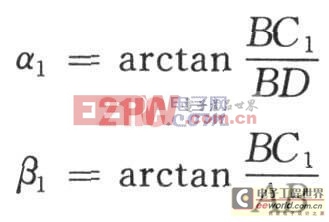
采用H橋電路來驅(qū)動智能尋跡車的前輪轉(zhuǎn)向電機和后輪驅(qū)動電機,實現(xiàn)智能尋跡車左右轉(zhuǎn)向、前進(jìn)、后退、加速、減速等功能。轉(zhuǎn)向電機驅(qū)動電路如圖3所示。其中前輪轉(zhuǎn)向電機控制方案為分級轉(zhuǎn)向控制,后輪驅(qū)動電機控制方案亦為開環(huán)控制。
2.4 分級轉(zhuǎn)向模塊
為了實現(xiàn)在不同的轉(zhuǎn)彎半徑處實現(xiàn)不同角度的精確轉(zhuǎn)向,設(shè)計了分級轉(zhuǎn)向電路,如圖3所示。車模舵機中可變電阻阻值為1.8~4.2 kΩ,1接單片機A/D管腳。電壓V為片內(nèi)穩(wěn)定基準(zhǔn)電壓,且可以看出:

以1號傳感器為例,說明分級轉(zhuǎn)向角度計算。
傳感器模塊安裝如圖4所示,所有尺寸經(jīng)過前期設(shè)計計算,D點為前輪舵機可調(diào)電阻轉(zhuǎn)向中心,A點為小車轉(zhuǎn)向中心。當(dāng)1號傳感器檢測到黑線時,前輪轉(zhuǎn)向角度以及與前輪轉(zhuǎn)向角度對應(yīng)的前輪舵機中可變電阻轉(zhuǎn)向角度計算為:
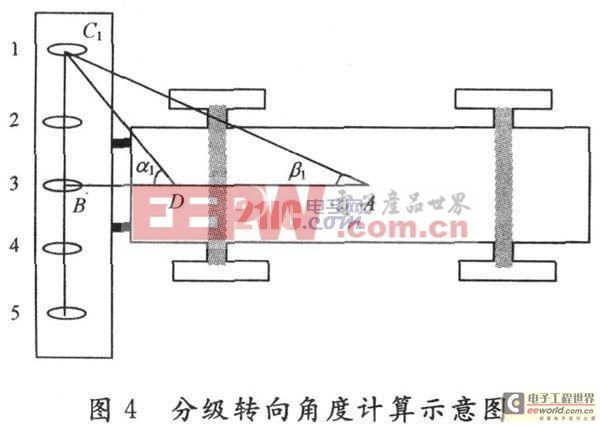
V3值線性正比于前輪舵機中可變電阻角度α1,因此,不同的傳感器探測位置,可以計算得出不同的理想前輪轉(zhuǎn)向角度,不同的理想轉(zhuǎn)向A/D電壓,通過單片機測量V3,即可換算前輪舵機中可變電阻轉(zhuǎn)向角度a1,并與理想轉(zhuǎn)向A/D電壓比較,當(dāng)V3達(dá)到理想轉(zhuǎn)向A/D電壓,單片機控制給舵機低電平,舵機停轉(zhuǎn),保持轉(zhuǎn)向,從而實現(xiàn)精確分級轉(zhuǎn)向。
3 軟件設(shè)計
3.1 主程序設(shè)計
采用C語言在ICC—AVR開發(fā)環(huán)境下進(jìn)行編程調(diào)試。主程序流程圖如圖5所示。

3.2 分級模塊程序設(shè)計
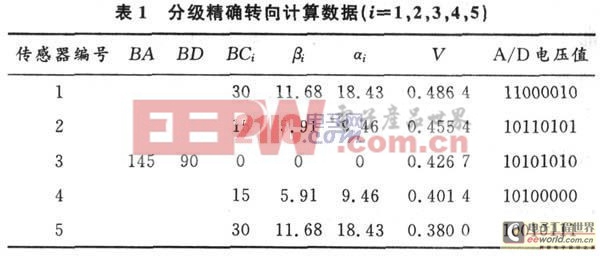
ATMEGAl6能對來自端口A的8路單端輸入電壓進(jìn)行采樣。當(dāng)片中ADC多功能寄存器ADMUX的REFSl和 REFS0設(shè)置為1時,VAREF=2.56 V,為片內(nèi)穩(wěn)定基準(zhǔn)電壓源,即圖3中電壓V。智能尋跡車轉(zhuǎn)向極限為±30°,表1為5個光電傳感器分級精確轉(zhuǎn)向相應(yīng)計算數(shù)據(jù)。
4 結(jié) 語
基于視覺的智能尋跡車模設(shè)計方案能夠在線型復(fù)雜,轉(zhuǎn)彎半徑不確定性大的情況下,利用視覺自主尋跡前進(jìn),分級精確轉(zhuǎn)向。對于環(huán)境光線的影響,可考慮增加濾波電路、優(yōu)化控制算法增加其抗干擾能力。實驗證明,該方案有良好的尋跡效果。




評論