采用SPMC75F2413A實現交流變頻驅動控制的應用

1引言
系統輸入電源電壓為AC110V/AC220V,經全波整流后供系統使用。系統使用Sunplus公司的SPMC75F2413A產生AC三相異步電機的VVVF控制所需的SPWM信號,并完成 系統控制。使用智能功率模塊實現電機的功率驅動。在AC220V輸入時,系統最大能驅動1.5KW的負載。系統的變頻區間為2Hz~200Hz。
2系統框圖
系統結構如圖2-1所示,主要由變頻電機、電源供給、IPM功率放大、IPM隔離驅動、SPMC75F2413A組成的控制核心幾部分構成。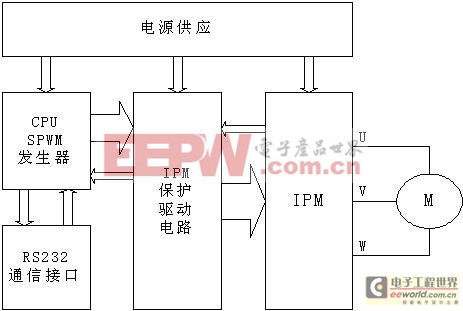
圖 2-1 系統結構圖
3感應馬達V/F控制
3.1 功能描述
利用SPMC75F2413A的TMR3實現AC三相異步電機的V/F開環控制。使用DDS(直接數字頻率合成)的方式產生控制所需要的三相SPWM。根據電機的V/F曲線隨頻率自動調整輸出電壓的大小。由于DDS固有的特點,在進行頻率調整的過程中相位是連續的,用戶可以在任何時候更改輸出頻率而不需關心當前的相位問題。同時,用戶可以根據自己需要更換波形數據表而實現非正弦的波形輸出。
3.2 設計原理
3.2.1感應馬達V/F控制原理
在電機調速時,最重要是要保持磁通 為額定值不變。在直流電機中,勵磁系統獨立,只要對電樞進行合適的補嘗,保持不變很容易。而在交流異步電機中,磁通是定子和轉子的磁勢合成的。而且滿足:
為額定值不變。在直流電機中,勵磁系統獨立,只要對電樞進行合適的補嘗,保持不變很容易。而在交流異步電機中,磁通是定子和轉子的磁勢合成的。而且滿足: (3--1)
(3--1)
式中: --氣隙磁通在定子每相中的感應電動勢的有效值;
--氣隙磁通在定子每相中的感應電動勢的有效值; --定子頻率;
--定子頻率; --定子每相繞組的串聯匝數;
--定子每相繞組的串聯匝數; --基波繞組系數;--每極氣隙磁通量;
--基波繞組系數;--每極氣隙磁通量;
由式(2--1)可知,只要控制好和,便可達到控制磁通的目的,為此,得考慮基頻以下和基頻以上兩種工作情況。
1.基頻以下調速
由式(2--1)可知,只要保持 為常值,就可以保持不變。但是,繞組中的感應電動勢是很難直接控制的,在電動勢較高時可以忽略定子繞組的阻抗壓降而認定,則有
為常值,就可以保持不變。但是,繞組中的感應電動勢是很難直接控制的,在電動勢較高時可以忽略定子繞組的阻抗壓降而認定,則有 = 常值;在低頻時
= 常值;在低頻時 和都比較小,這時不能忽略,可以人為的抬高去補嘗定子繞組的阻抗壓降。
和都比較小,這時不能忽略,可以人為的抬高去補嘗定子繞組的阻抗壓降。
2.基頻以上調速
當基頻以上調速時,頻率往上升高,但卻不能比額定電壓 還要大,頂多只能使 =。因此,由式(3--1)可知,這將迫使磁通與頻率成反比,相當于直流電機弱磁升速的情況。
還要大,頂多只能使 =。因此,由式(3--1)可知,這將迫使磁通與頻率成反比,相當于直流電機弱磁升速的情況。
將以上二種情況結合起來就可以得到異步電機如圖 3-1所示的變頻調速特性。同時這也是變頻電機調速的V/F曲線圖。在實際運用中,V/F開環控制也是沿著這條曲線進行的。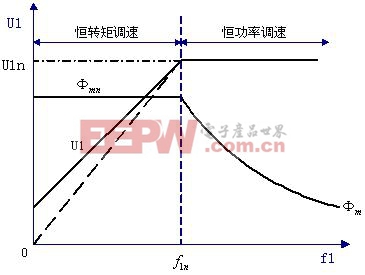
圖 3-1 三相感應電機的V/F曲線
3.2.2正弦波生成原理
要使三相感應馬達正常運行,需要使其電樞繞組通以三相交變電流,以產生圓形旋轉磁場。產生三相交變電流的方法有很多,本例中使用SPWM來產生三相正弦電流。圖 3-2 是三相SPWM生成原理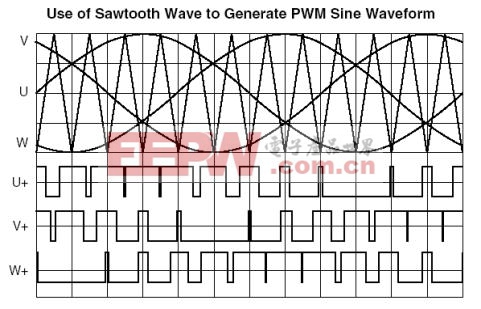
圖 3-2 三相SPWM生成原理
本例使用DDS(直接數字頻率合成)的方式產生SPWM。如圖3 -3 所示,整個系統是一個典型的DDS頻率合成系統,只不過用PWM發生模塊去替換了傳統的DAC。在本系統中波形數據表的大小為1024點,PWM載波頻率為10KHz。波形數據表取1024點一是為了計算方便,因為在相位累加后查表的過程中有一個相位截取的操作(我們的相位累加器是16位的,而波形數據表是1024點--10位),為了加快這一處理過程,選用以 大小的表有利于加快處理過程,以盡量節約CPU的運算時間。同時當波形數據表為1024點時,波形發生過程中的理論的最大相位誤差
大小的表有利于加快處理過程,以盡量節約CPU的運算時間。同時當波形數據表為1024點時,波形發生過程中的理論的最大相位誤差 這樣加上軟件處理過程中引起的一些相位抖動,最大的相位誤差也不會超過
這樣加上軟件處理過程中引起的一些相位抖動,最大的相位誤差也不會超過 。同時,在三相同時產生時,由于表的大小是,不是3的整數倍,因此代表
。同時,在三相同時產生時,由于表的大小是,不是3的整數倍,因此代表 和
和 相位差的常數會有
相位差的常數會有 的誤差,會使三相之間的相位關系不是整好的和,但誤差不會超過
的誤差,會使三相之間的相位關系不是整好的和,但誤差不會超過 。還有,較大的數據表有利于保證低頻時的波形精度。
。還有,較大的數據表有利于保證低頻時的波形精度。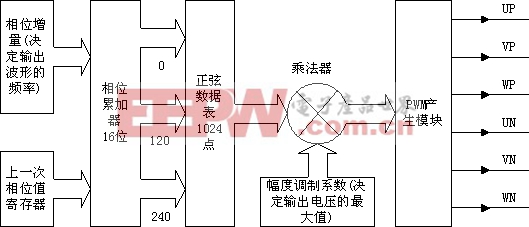
圖 3-3 三相SPWM生成原理圖
注意:本例所討論的一些公式都是保證波形的幅度精度比相位精度高情況。實際上,當幅度精度變差時,相位誤差會變大。本例中的波形數據表不限于標準的正弦表,用戶可以根據自己的需要決定自己的波形。如加入三次諧波的增強型波形等。在V/F控制中,當頻率比基頻低時,調制系數小于1,有效樣點數會比實際樣點數少,因為幅度調制使波形的幅度分辯率下降,會出現樣點重復的情況。因此,建議用戶在低頻時提高PWM的分辨率。
4軟件說明
系統的軟件部分主要是完成AC變頻馬達的V/F開環變頻驅動功能,主要包括SPWM發生的中斷服務函數,DMC通信協調等幾個部分。
4.1 主流程與說明
主程序在完成系統初始化以后,就不斷檢測有沒有來自PC的控制信息,如果有便完成相應的控制功能,沒有就繼續檢測。
主程序主要完成各個模塊的初始化,而后便監視UART的數據接收情況,如果收到了有效的波形參數數據,則調用SPMC75_SPWM_VF_account(unsigned int F,unsigned int Kvf,int Moto) 對波形參數進行預置更新,而波形數據將在預置更新完成后的第一個PWM周期中斷中完成波形數據更新操作。主程序流程如圖 4-1所示。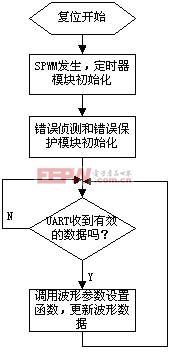
圖 4-1 主程序流程
4.2 中斷子流程與說明
進入PWM的周期中斷片后,程序首先判斷有沒有新的波形參數設置,如果沒有就直接進入DDS頻率合成,如果有則先更新波形參數(相位增量和幅度調制系數),而后進入DDS頻率合成。DDS合成是在每一次PWM的周期中斷,波形相位在原相位的基礎上加上用戶設置的相位增量值N(這個值正比于波形頻率),而后查出這個相位所對應的幅度值,同時還查出距這個相位120度和240度的二個相位對應的幅度值,最后將這三個值分別乘以幅度調制系數AM后送入PWM產生模塊產生相應占空比的PWM信號。其流程圖如圖 4-2所示。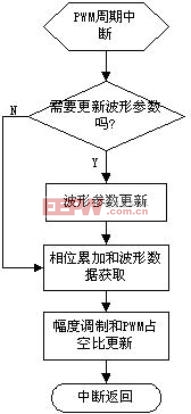
x圖4-2 TMR3周期中斷服務流程
5實測波形
以下是驅動例的實測電流波形: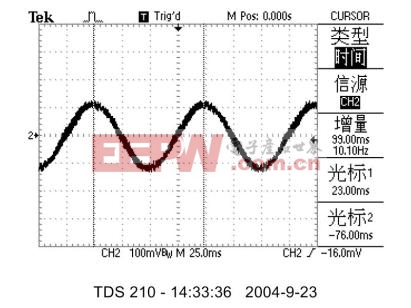
圖5-1 10Hz時的電流波形 100mV/A
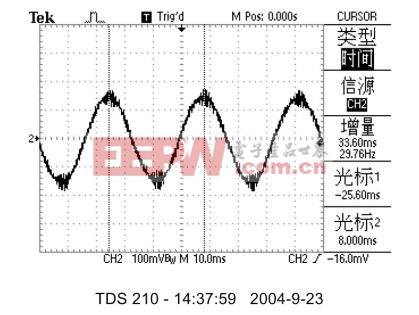
圖5-2 30Hz時的電流波形 100mV/A
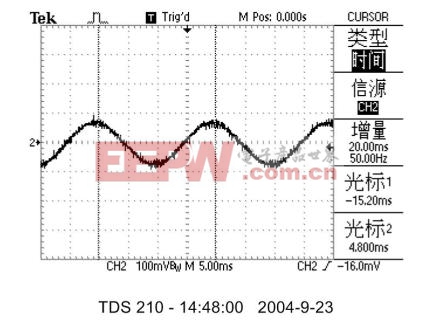
圖5-4 70Hz時的電流波形 100mV/A
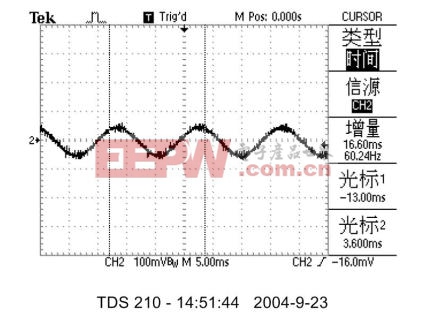
圖5-4 70Hz時的電流波形 100mV/A
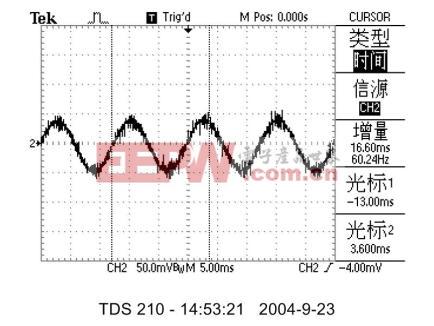
圖5-5 100Hz時的電流波形 100mV/A
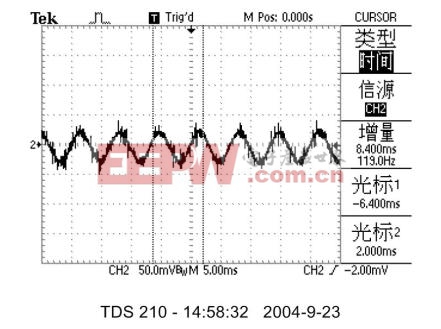
圖5-6 150Hz時的電流波形 100mV/A

pwm相關文章:pwm是什么
評論