基于51單片機的智能型汽車防撞報警器的設計

隨著現代生活節奏的加快,交通事故發生的頻率也在增加,為提高汽車運行的安全性,本文介紹一種單片機控制的汽車防撞報警系統。該裝置將單片機的實時控制及數據處理功能,與超聲波的測距技術、傳感器技術相結合,可檢測汽車運行中后方障礙物與汽車的距離及汽車車速,通過數顯裝置顯示距離,并由發聲電路根據距離遠近情況發出警告聲。
1 超聲波測距原理
超聲波測距的原理是,通過不斷檢測超聲波發射后遇到障礙物所反射的回波,從而測出發射超聲波和接收到回波的時間差T,然后求出距離S=C×T/2,其中,C為超聲波波速,常溫下取為344m/s。聲速確定后,只要測得超聲波往返的時間,即可求得距離。
2 測速原理
汽車車速的測量是通過霍爾集成傳感器來實現的。即,將裝有永久磁鐵的轉盤的輸入軸與車輪的轉軸相連,當車輪轉動時,轉盤隨之轉動,此時,轉盤上的永久磁鐵會經過霍爾集成傳感器,從而在霍爾集成傳感器的輸入端得到一個磁信號,如果轉盤不停轉動,霍爾集成傳感器便會輸出轉速信號。可以說,對汽車車速的測量實質上是對轉速信號的頻率的測量。
3 控制器AT89C2051的功能與特點
AT89C2051是一個低功耗、高性能的CMOS8位微處理器,與MCS-51系列指令集和引腳兼容,具有以下特點:128 bytes內部RAM,2Kbytes EPROM,15根I/O線,2個16位定時/計數器,5個兩級中斷源,1個全雙工串行口,一個片內精密模擬比較器和片內振蕩器,低功耗的閑置和掉電模式。工作電壓范圍4.25V~5.5V,工作頻率取12MHz。
AT89C2051中的兩個16位定時/計數器寄存器T0和T1,作定時器時,可計數機器周期,計數頻率為振蕩頻率的1/12;作計數器時,可對外部輸入引腳P3.4/T0和P3.5/T1上出現從1至0的變化時增1,計數頻率為振蕩頻率的1/24。
4 硬件系統設計
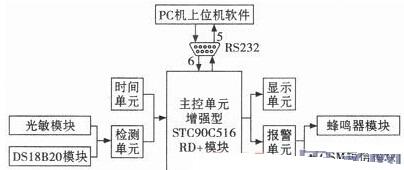
該報警器由控制系統、超聲波發射電路、接收電路、測速電路、報警電路、LED顯示電路組成,電路原理框圖見圖1。
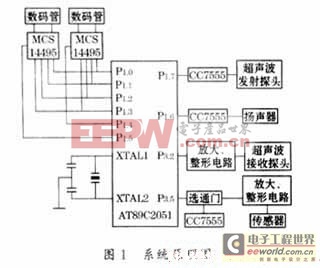
超聲波發射電路由CC7555時基電路和超聲波發射探頭組成。單片機AT89C2051的P1.7引腳控制CC7555時基電路產生40kHz的頻率信號給超聲波發生器,由超聲波探頭發射的超聲波射向障礙物。利用超聲波測距具有以下特點:測量靈敏度高,穿透力強,測量速度快,測量角度大,可對較大范圍內的物體進行檢測。
超聲波接收電路由超聲波接收探頭、放大器和整形器組成。由障礙物反射回來的超聲波經接收探頭,變換為電脈沖信號,再由放大器、整形器放大和整形后送入到單片機AT89C2051的P3.2引腳。放大器宜選用有足夠增益和較低噪聲的寬帶放大器,以保持脈沖信號尤其是前沿不發生畸變,提高測距的精度。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理







評論