基于51單片機的智能嬰兒車控制系統設計

2.4 遙控模塊電路的設計
遙控模塊采用市場上常見的車載MP3遙控器。可與MP3解碼模塊無縫連接。采用內部程序調用其按鍵對時間等進行無線操作。
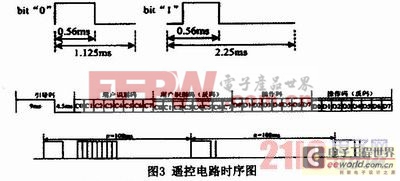
遙控解碼采用中央處理器,按照NEC制式。NEC標準:遙控載波的頻率為38kHz(占空比為1:3);當某個按鍵按下時,系統首先發射一個完整的全碼,然后經延時再發射一系列簡碼,直到按鍵松開即停止發射。簡碼重復延時108ms,每兩個引導脈沖上升沿之間的間隔都是108ms。一個完整的全碼如圖3所示。其中,引導碼高電平4.5ms,低電平4.5ms;系統碼8位,數據碼8位,共32位;數據0用“高電平0.5625ms+低電平0.5625ms”表示,數據1用“高電平0.5625ms+低電平1.6875ms”表示,一個簡碼=引導碼+系統碼位0的反碼+結束位(0.5625ms,)高電平。其時序及工作原理如圖3所示。
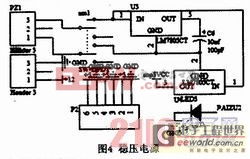
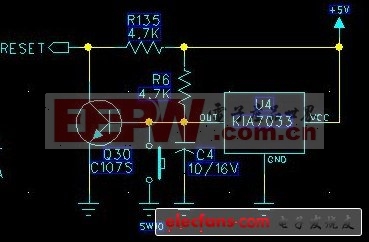
2.5 系統電源的設計
針對此電路功率大的特點,本文采用獨立電源設計,分別分為單片機工作電源、MP3解碼模塊電源、電機驅動電源。其電路如圖4所示。
2.6 電機控制設計
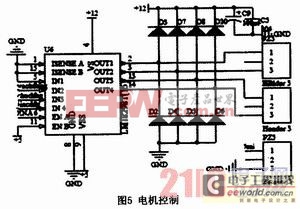
2.6.1 電機驅動電路設計
嬰兒車共有兩個電機,分別控制嬰兒的搖晃和奶瓶的開啟與關閉,采用以L289N為核心的驅動電路。其電路如圖5所示。
2.6.2 電機調速電路設計
考慮到電機為大功率的直流電機,電機外形已經固定。控制磁極對數實現調速不現實。串電阻由于其工作負載較大而電流變化大,綜上所述,本文采用PWM波的方式來實現電機的調速。PWM波的產生有軟件和硬件兩種實現方式。
方案一:通過軟件,所需硬件在原有的89C52的基礎上額外地添加A/D電轉換環節,及A/D轉換。
方案二:通過硬件,所需硬件為常見的555定時器。
綜上對比,后者無論是在程序設計還是成本上都優于前者,其設計電路如圖6所示。
紅外遙控器相關文章:紅外遙控器原理









評論