基于51單片機的超聲波理療儀設計

6 單片機控制
本設計采用ATMEL公司的AT89C2051單片機來組成控制系統。由于系統的要求不很嚴格,即不要求高運算速度,也不要求大內存,而只要求有一定的抗震性,且價格便宜,以達到經濟實惠的目的即可。因此,筆者選用AT89C2051型CPU。這種CPU的使用溫度范圍為-40℃~125℃,有20個管腳,是8051型CPU的簡易版,完全能滿足本系統的使用要求。由于主程序主要完成模塊初始化以及自身程序的調用,因而其結構清晰簡單,圖8所示是它的控制軟件流程圖。
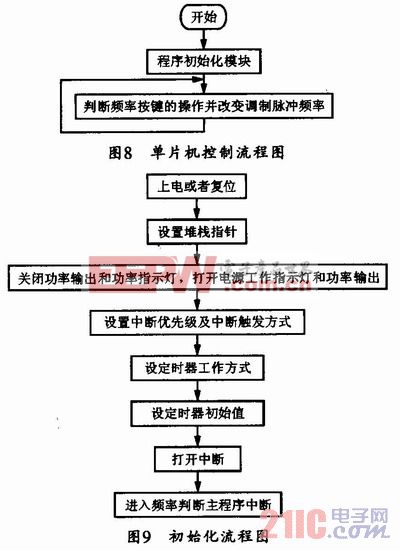
其次就是初始化模塊,其作用是讓定時器、中斷等回復到最原始的狀態。比如使定時器工作在工作方式1,定時器1的中斷優先級最高等等。它的初始化流程圖如圖9所示。
第三就是功率輸出調節,本理療儀輸出功率共分三檔(低、中、高),設計時采用單片機輸出控制后續BJT電路的靜態偏置電壓,從而改變BJT靜態工作點,使壓電晶體兩端的輸出電壓幅度發生變化,以調節輸出功率。設計時可通過外部按鍵中斷來調用中斷服務程序,從而實現這一功能。其原理是通過按鍵的次數來判斷進入哪一個中斷,并且調用相應的子程序。由于這里的功率分為三檔,因此,可用按鍵次數除以4所得的余數來判斷,即:
如果按鍵次數為4N(N=0,1,2,3………),那么不輸出功率;
如果按鍵次數為4N+1(N=0,1,2,3………),則調用低功率輸出子程序;
以此類推,便可以實現三種不同功率的輸出。
以下是其部分代碼:
INTOSER: ACALL DELAY :延時程序去處按鍵抖動
………
MOV B,#04H ;設置除數為4
MOV A,R3 ;設置被除數
DIV AB
MOV A,B ;取得余數
MOV R3,B
RL A
ADD A,R3
MOV R5,A;設置偏移量為3個字節
MOV DPTR,#PMTB ;取表首地址
JMP @A+DPTR ;判斷按鍵次數跳轉到相應的輸出程序
7 結束語
本設計主要給出了超聲波從產生到控制的一個較詳細的實現方案。相對于其他方法,此方案較為簡單,并且成本較低,用的器件都是比較常見的。高頻和低頻信號獨立產生,便于對兩種信號進行調整,而且用單片機作為控制芯片,其靈活性較高,同時還可以根據不同的要求進行修改,從而滿足各種實際需求。









評論