基于51單片機的邏輯無環流可逆調速系統設計

PI調節器的控制規律為:

式中,y(t)為PI調節器的輸出量;e(t)為PI調節器的輸入量;Kp為比例系數;T1為積分時間常數。
對式(1)離散化后,可得第(k-1)和k次采樣時刻間的調節器輸出增量為△y(k)為:
式中,△e=ek-ek-1;yk為PI調節器第k次輸出量;yk-1為PI調節器第(k-1)次輸出量;ek為第七次采樣時,給定量與反饋量之間的偏差;ek-1為第k-1次采樣時,給定量與反饋量之間的偏差;KI為積分系數,![]()
由式(5)求得差分方程為:
式中,KI=Kp-K2,K2=TKI;yn為第n次的采樣輸出;△Un為第n次的采樣時輸入偏差。為了提高精度,PI運算采用雙字節。
3.3 無環流邏輯控制
無環流邏輯控制是根據速度調節器輸出值的正負選擇VR和VF晶閘管,并由轉矩極性檢測做出相應邏輯判斷,釋放一組晶閘管,閉鎖另一組晶閘管,并記憶VF和VR晶閘管的工作狀態(0或1),存儲在單片機存儲單元L1、L2。當釋放晶閘管時,L1、 L2存儲1;而封鎖晶閘管時,L1、L2中存儲0。將這些狀態信號送至單片機的P1.5和P1.6引腳控制觸發脈沖的釋放與閉鎖。
4 系統軟件設計
用于控制電流和速度的軟件設計決定著調速裝置性能的好壞,要求單片機控制的邏輯無環流調速系統在幾個毫秒完成兩個閉環系統的信號采樣、數字濾波、PI運算和實時控制。其主程序流程如圖3所示。
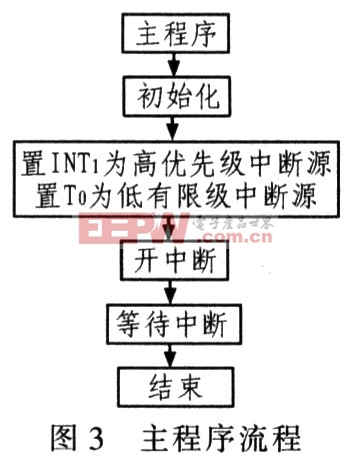
主程序中,等待中斷是一條踏步命令,由于電流內環響應速度快于速度外環的響應速度,為此,在定時中斷服務程序T0中,嵌套有外部中斷1的中斷請求。外部中斷1的中斷服務程序,先進行電流采樣,再根據電流的情況進行帶限幅的PI運算和數字觸發。系統通過定時器T0中斷服務程序,實現速度的采樣、濾波及無環流邏輯切換。









評論