從零開始51單片機教程 —— 26 單片機鍵盤接口程序設計

鍵盤是由若干按鈕組成的開關矩陣,它是單片機系統中最常用的輸入設備,用戶能通過鍵盤向計算機輸入指令、地址和數據。一般單片機系統中采和非編碼鍵盤,非編碼鍵盤是由軟件來識別鍵盤上的閉合鍵,它具有結構簡單,使用靈活等特點,因此被廣泛應用于單片機系統。
按鈕開關的抖動問題
組成鍵盤的按鈕有觸點式和非觸點式兩種,單片機中應用的一般是由機械觸點組成的。在下圖中,當開
鍵盤結構圖>
圖1 |
圖2 |


關S未被按下時,P1。0輸入為高電平,S閉合后,P1。0輸入為低電平。由于按鈕是機械觸點,當機械觸點斷開、閉合時,會有抖動動,P1。0輸入端的波形如圖2所示。這種抖動對于人來說是感覺不到的,但對計算機來說,則是完全能感應到的,因為計算機處理的速度是在微秒級,而機械抖動的時間至少是毫秒級,對計算機而言,這已是一個“漫長”的時間了。前面我們講到中斷時曾有個問題,就是說按鈕有時靈,有時不靈,其實就是這個原因,你只按了一次按鈕,可是計算機卻已執行了多次中斷的過程,如果執行的次數正好是奇數次,那么結果正如你所料,如果執行的次數是偶數次,那就不對了。
為使CPU能正確地讀出P1口的狀態,對每一次按鈕只作一次響應,就必須考慮如何去除抖動,常用的去抖動的辦法有兩種:硬件辦法和軟件辦法。單片機中常用軟件法,因此,對于硬件辦法我們不介紹。軟件法其實很簡單,就是在單片機獲得P1。0口為低的信息后,不是立即認定S1已被按下,而是延時10毫秒或更長一些時間后再次檢測P1。0口,如果仍為低,說明S1的確按下了,這實際上是避開了按鈕按下時的抖動時間。而在檢測到按鈕釋放后(P1。0為高)再延時5-10個毫秒,消除后沿的抖動,然后再對鍵值處理。不過一般情況下,我們常常不對按鈕釋放的后沿進行處理,實踐證明,也能滿足一定的要求。當然,實際應用中,對按鈕的要求也是千差萬別,要根據不一樣的需要來編制處理程序,但以上是消除鍵抖動的原則。
鍵盤與單片機的連接
圖3 |
圖4 |
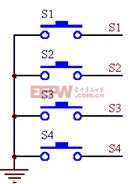
1、通過1/0口連接。將每個按鈕的一端接到單片機的I/O口,另一端接地,這是最簡單的辦法,如圖3所示是實驗板上按鈕的接法,四個按鈕分別接到P3.2 、P3.3、P3.4和P3.5。對于這種鍵各程序能采用持續查詢的辦法,功能就是:檢測是否有鍵閉合,如有鍵閉合,則去除鍵抖動,判斷鍵號并轉入對應的鍵處理。下面給出一個例程。其功能很簡單,四個鍵定義如下:
P3.2:開始,按此鍵則燈開始流動(由上而下)
P3.3:停止,按此鍵則停止流動,所有燈為暗
P3.4:上,按此鍵則燈由上向下流動
P3.5:下,按此鍵則燈由下向上流動
UpDown EQU 00H ;上下行標志
StartEnd EQU 01H ;起動及停止標志
LAMPCODE EQU 21H ;存放流動的數據代碼
ORG 0000H
AJMP MAIN
ORG 30H
MAIN:
MOV SP,#5FH
MOV P1,#0FFH
CLR UpDown ;啟動時處于向上的狀態
CLR StartEnd ;啟動時處于停止狀態
MOV LAMPCODE,#0FEH ;單燈流動的代碼
LOOP:
ACALL KEY ;調用鍵盤程序
JNB F0,LNEXT ;如果無鍵按下,則繼續
ACALL KEYPROC ;不然調用鍵盤處理程序
LNEXT:
ACALL LAMP ;調用燈顯示程序
AJMP LOOP ;反復循環,主程序到此結束
DELAY:
MOV R7,#100
D1: MOV R6,#100
DJNZ R6,$
DJNZ R7,D1
RET
;----------------------------------------延時程序,鍵盤處理中調用
KEYPROC:
MOV A,B ;從B寄存器中獲取鍵值
JB ACC.2,KeyStart ;分析鍵的代碼,某位被按下,則該位為1(因為在鍵盤程序中已取反)
JB ACC.3,KeyOver
JB ACC.4,KeyUp
JB ACC.5,KeyDown
AJMP KEY_RET
KeyStart:
SETB StartEnd ;第一個鍵按下后的處理
AJMP KEY_RET
KeyOver:
CLR StartEnd ;第二個鍵按下后的處理
AJMP KEY_RET
KeyUp: SETB UpDown ;第三個鍵按下后的處理
AJMP KEY_RET
KeyDown:
CLR UpDown ;第四個鍵按下后的處理
KEY_RET:RET
KEY:
CLR F0 ;清F0,表示無鍵按下。
ORL P3,#00111100B ;將P3口的接有鍵的四位置1
MOV A,P3 ;取P3的值
ORL A,#11000011B ;將其余4位置1
CPL A ;取反
JZ K_RET ;如果為0則一定無鍵按下
ACALL DELAY ;不然延時去鍵抖
ORL P3,#00111100B
MOV A,P3
ORL A,#11000011B
CPL A
JZ K_RET
MOV B,A ;確實有鍵按下,將鍵值存入B中
SETB F0 ;設置有鍵按下的標志
K_RET:
ORL P3,#00111100B ;此處循環等待鍵的釋放
MOV A,P3
ORL A,#11000011B
CPL A
JZ K_RET1 ;直到讀取的數據取反后為0說明鍵釋放了,才從鍵盤處理程序中返回
AJMP K_RET
K_RET1:
RET
D500MS: ;流水燈的延遲時間
PUSH PSW
SETB RS0
MOV R7,#200
D51: MOV R6,#250
D52: NOP
NOP
NOP
NOP
DJNZ R6,D52
DJNZ R7,D51
POP PSW
RET
LAMP:
JB StartEnd,LampStart ;如果StartEnd=1,則啟動
MOV P1,#0FFH
AJMP LAMPRET ;不然關閉所有顯示,返回
LampStart:
JB UpDown,LAMPUP ;如果UpDown=1,則向上流動
MOV A,LAMPCODE
RL A ;實際就是左移位而已
MOV LAMPCODE,A
MOV P1,A
LCALL D500MS
AJMP LAMPRET
LAMPUP:
MOV A,LAMPCODE
RR A ;向下流動實際就是右移
MOV LAMPCODE,A
MOV P1,A
LCALL D500MS
LAMPRET:
RET
END
以上程序功能很簡單,但它演示了一個單片機鍵盤處理程序的基本思路,程序本身很簡單,也不很實用,實際工作中還會有好多要考慮的因素,比如主循環每次都調用燈的循環程序,會造成按鈕反應“遲鈍”,而如果一直按著鍵不放,則燈不會再流動,一直要到松開手為止,等等,大家能仔細考慮一下這些問題,再想想有什么好的解決辦法。
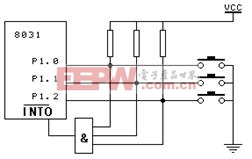
2、采用中斷方式:如圖4所示。各個按鈕都接到一個與非上,當有任何一個按鈕按下時,都會使與門輸出為低電平,從而引起單片機的中斷,它的好處是不用在主程序中持續地循環查詢,如果有鍵按下,單片機再去做對應的處理












評論