GPS/GPRS車載監控終端的設計與實現

三 車載終端軟件設計
本軟件系統采用模塊化設計方法,每個模塊實現一個功能或一個協議,各功能模塊以子函數形式出現,縮短了軟件開發時間,易于程序修改和移植,同時,在編寫軟件時,還留有一些軟件應用接口,便于軟件升級,如增加新協議。
軟件系統功能模塊如圖3所示。

1 軟件系統的工作流程
車載終端軟件系統的主要功能是由主程序完成的。主程序采用狀態機的系統結構,其工作流程如圖4所示。
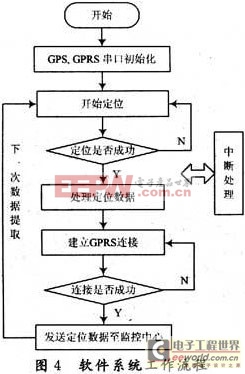
程序工作時先進行GPS和GPRS串口初始化工作,然后進入主控制循環。在主控循環中,先識別GPS數據是否有效,即定位是否成功,定位成功則系統轉到下一個狀態,建立GPRS連接,否則重新定位。建立好GPRS連接后便可以向監控中心發送處理后的定位數據。同時,主程序運行的過程中,還能響應遙控器輸入中斷請求,以便實現其他功能。
2 軟件系統協議棧
借鑒于OSI模型和標準的TCP/IP協議棧,本系統采用四層網絡傳輸協議:傳輸層、網絡層、數據鏈路層和物理層。系統協議棧結構如圖5所示。
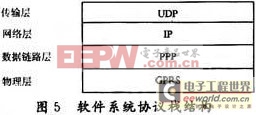
考慮到車輛監控系統中幾十、幾百甚至上千個車載終端的情況,對于這種數據量小、多點分散、實時性要求高、終端數量多的應用,傳輸層采用UDP比TCP會更好一些。IP協議作為網絡層協議,主要是將數據流切割成適當的大小,然后將這些數據包通過選擇路由,利用不同的路由來傳送到目的地IP。在物理層之上,PPP協議作為GPRS在物理層之上的惟一指定的數據鏈路層協議,通過CRC校驗、確認等手段將原始的物理層連接改造成無差錯的數據鏈路。PPP協商成功后,系統將成功遠程登錄Internet,并得到網關分配給自己的IP。終端與網絡之間的物理層通道就是GPRS連接。具體的GPRS協議都已被做在GPRSmodem中,通過數據端對GPRSmodem正確的AT指令設置后,就可以用AT撥號指令進行撥號連接,當收到GPRSmodem的撥號反饋應答后,一條物理通道即GPRS信道就在本終端中和網絡之間建立起來了。
3 城市智能交通的未來發展趨勢
隨著城市交通問題的日益發展,城市交通綜合信息平臺、全球定位與車載導航系統、城市公共交通車輛以及出租車的車輛指揮與調度系統、城市綜合應急系統都將迎來較大的發展機遇。
總體而言,城市智能交通系統的發展趨勢將表現為綜合化、多部門驅動型的發展模式。由于城市智能交通體系將涉及相關的市民、公安交通管理、交通部門車輛管理、城市建設、通信等相關部門工作,因而未來城市智能交通的發展過程必然是一個涉及以交通與公安為主的多部門驅動的發展過程。
四 總結
本文介紹了基于GPS/GPRS的車輛監控系統終端的實現方案,給出了詳細的軟件及硬件組成和設計實現,經多次測試系統穩定,效果良好。該系統可以應用手指揮監控系統、城市租賃汽車管理系統、物流運輸系統、醫療救護系統等領域,市場前景極為廣闊。













評論