基于MSP430的倒車雷達的設計

系統軟件設計
軟件采用模塊化設計,法式由主法式、測距子法式和鍵盤顯示子法式、時鐘顯示子法式等多個模塊構成,調試過程中對此中每個功能模塊和子法式一一調試大學生創業政策,在每個子法式都完成指定的功能后大學生創業基金寧波大學4支創業團隊獲甬商大學生創投基金投資,再進行綜合調試。系統的軟件流程如圖8所示。
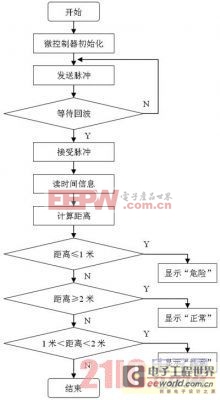
圖8 系統軟件流程圖 超聲波發射電發出超聲波的同時計數器起頭計數,當碰到障礙物反饋旌旗燈號到超聲波領受器領受,經CX20106領受電處置后,發生一個低脈沖,該旌旗燈號傳送給單片機發生間斷,挪用測距子法式,計較出測量距離,挪用顯示子法式,按照分歧的測量數值在液晶上顯示距離和報警。當距離大于2m,顯示“平安”和測量距離,繼續測量;當距離小于1m時,顯示“”和測量距離,由P1.2位驅動蜂鳴器報警;當距離小于2m且大于1m時,顯示“注重”和測量距離。為加強抗干擾能力,系統持續發射超聲波測量三次,從中剔除最大最小值,取中心值計較出切確的距離。如許每秒可測約三個數據,仍然可以知足及時性要求。
結語
該倒車雷達采用了高機能的MSP430F2274單片機,并充實操縱了其片上資本使得系統功能豐碩,利用的外圍芯片削減,系統靠得住性獲得提高。該倒車雷達應用于汽車中,當駕駛員倒車時,從液晶顯示屏上一目了然便知道障礙物離車的距離,降服了后視鏡小,視野窄的錯誤謬誤,消弭了倒車造成的變亂隱患。










評論