超聲波倒車防撞系統

3.4 聲光報警報警電路
如圖4 所示,聲報警電路選用壓電式蜂鳴器,它大約需要10 mA 的驅動電流。當單片機輸出低電平時,三極管導通,蜂鳴器報警。光報警電路如圖5 所示,當單片機p2.5 口輸出低電平時,二極管導通,燈亮發出光報警信號。
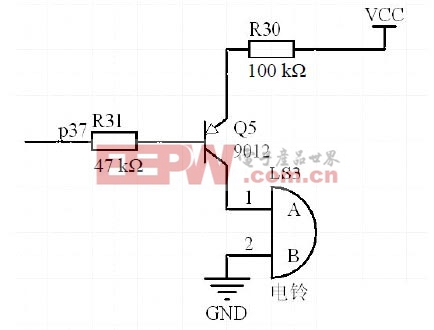
圖4 聲報警電路
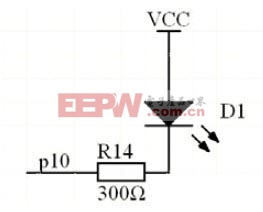
圖5 光報警電路
4 系統軟件設計
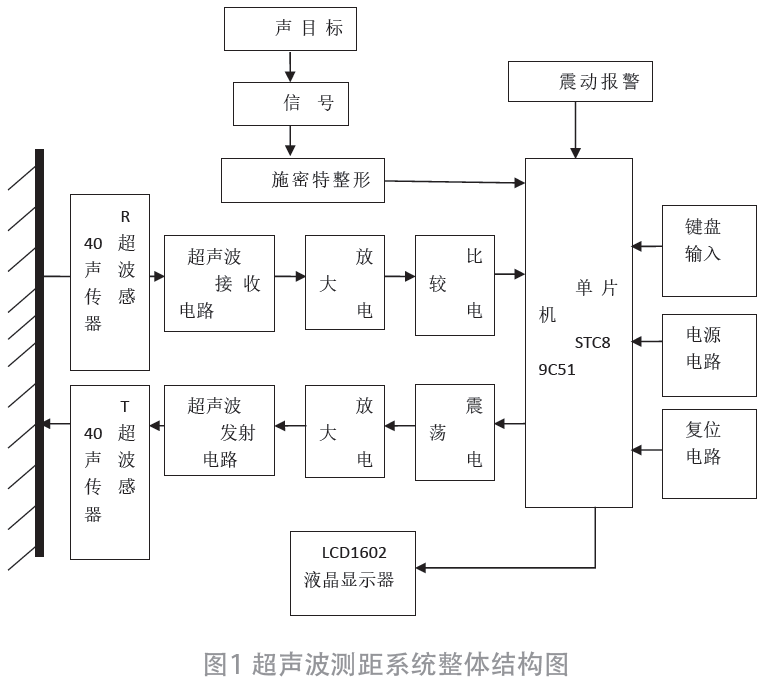
首先,微處理器AT89C51 先把P1.0 置0,通過軟件編程產生方波,送給超聲波傳感器,通過壓電陶瓷晶片發射超聲波(40 kHz 方波),延時300 us 左右(或者大于這個時間,這個延時是為了避免超聲波直接對反射過來的波的干擾,它決定了盲區的大小,延時時間越長,盲區越大,300 us 延時大概是10 cm 的盲區)抑制輸出干擾,同時啟動內部定時器T0 開始計時。當超聲波信號碰到障礙物時信號立即返回,而微處理器在不斷的掃描INT0 引腳,如果INT0 接收到的信號由高電平變為低電平,表明信號已經返回,微處理器進入中斷處理程序,同時關閉定時器T0。再把定時器中的數據經過處理就可以得出超聲波傳感器與障礙物之間的距離,顯示在LED 數碼管上。然后再根據相應的情況判斷是否要進行聲光報警。
程序啟動時,首先進行初始化,接著是一個不斷發射方波的過程,即調用發射子程序幾遍,而且每次發射周期結束后都會在延時等待的過程中判斷是否發生了中斷,即是否有反射回波產生,當有反射回波產生時,進入中斷服務程序,首先是關閉中斷,讀取定時器的時間t,根據時間,用超聲波測距公式S=340×t/2,就可以得到障礙物到超聲波發射器之間的距離,根據計算的結果,將距離顯示到LED 數碼管上。
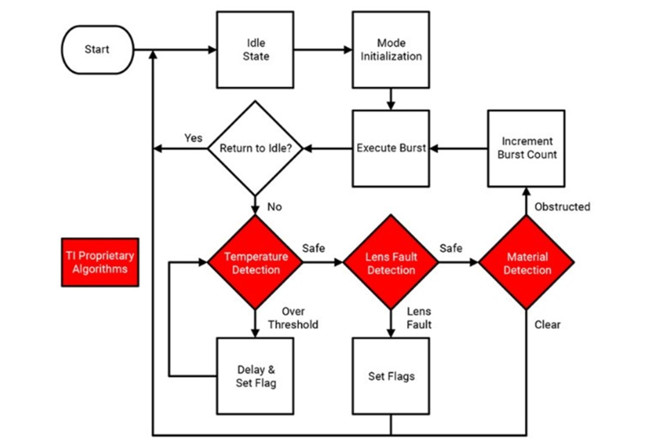
同時判斷距離是否小于0.5 m,如果小于0.5 m,就進行聲光報警。程序流程圖如圖6 所示。
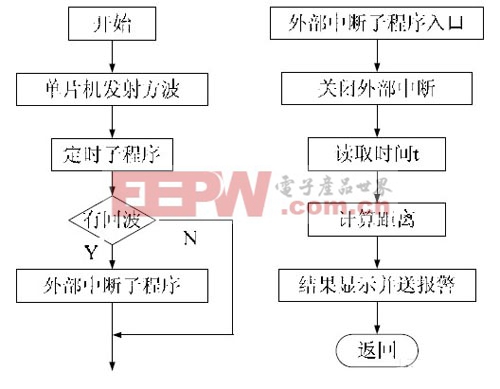
圖6 程序流程圖
5 結語
該系統利用51 系列單片機設計,設計簡單,操作方便。經實驗測試證明,該系統工作穩定,能滿足倒車防撞的要求,且成本較低,具有良好的性價比。可以應用到汽車倒車場合。由于超聲波受外界環境的影響,所以該系統存在一定的誤差,可以進行溫度補償,減小誤差,增強系統性能。










評論