基于MSP430F的車體調平裝置的設計與實現

隨著國防技術的發展,根據任務需求,越來越多的軍用武器需要隨時變更工作地點。為了保證這些軍用武器的機動性能,往往以載車為運輸載體,如火箭炮這樣的大型武器就被安裝在載車上。載車到達目的地后,借助平臺快速將武器架設調至水平而后工作,工作完成后平臺能夠快速地撤收、轉移。既保證了武器的工作性能,又提高了機動性。
傳統上,主要依靠人工手動完成平臺的水平度調節,這需要一部分人員手動調節千斤頂,另外一部分人員觀察水平儀的水泡位置。這種調平方式費時費力,且精度低、抗傾覆能力差。隨著調平時間和調平精度要求的提高,過去的調平方式已遠遠不能滿足實際情況的需要,所需時間短、精度高、抗傾覆能力強的自動調平控制技術應運而生。
在軍用方面,自動調平控制系統廣泛應用于機動發射裝置、導彈車、坦克火控調試臺等裝備。以火箭炮為例,火箭炮被大量使用在高科技戰爭中,為了提高其生存能力,對其機動性能也提出了更高的要求。制約火箭炮機動性的主要因素是火箭炮進入陣地后,進行架設并調整到水平狀態的時間。自動調平裝置是消除這一制約因素的關鍵設備。隨著電子元器件和自動控制技術的發展,自動調平裝置采用了許多新器件、新方法,使得調平時間和調平精度嚴格符合戰場要求。
設計火箭炮車體調平裝置的目的是使火箭炮在停車工作時其載車能夠迅速架設,實現武器系統平臺傾斜度的快速測量、計算和無線數傳,使其快速精確地達到水平,即在保證火箭炮工作性能的條件下最大程度的提高系統的機動性。
自動調平系統發展趨勢概述
目前,調平技術都已逐步成熟,但隨著武器機動性要求的不斷提高,也相應提高了對調平時間和調平精度的要求,與之相適應的自動控制調平技術也不斷發展。自動調平系統的發展方向主要是:
(1)精確性:系統的精確性主要取決于傾角傳感器的分辨率。隨著新結構、新材料、新工藝和新技術在高精度傾角傳感器中的應用,傾角傳感器的性能大幅度地提高了,傾角傳感器正從傳統的液體擺、氣體擺原理向伺服加速度及力平衡、重力擺原理發展,傾角傳感器的分辨率已達到0.001度或更高。
(2)穩定性:為了適應現代武器高機動性和快速反應能力的需求,要求車載平臺有更高的穩定性,采用機電伺服系統代替電液伺服系統,加上單片機系統可靠性與抗干擾技術的不斷發展,奠定了單片機系統穩定可靠工作的基礎。尤其是計算機與傳感器技術的發展,使高穩定性的調平系統得以實現。
(3)快速性:目前,傾角傳感器的響應速度已顯著提高,新型傾角傳感器響應時間達到了5毫秒,響應速度為200次/秒,再加上在系統中應用先進控制算法,都使得調平系統的調平時間大大縮短了,也就提高了武器系統的快速性。
(4)可操作性:在自動調平系統中設計有人機交互顯示面板,通過其圖形界面顯示系統的狀態及各種實時參數,并根據工作需要對系統進行參數設置。面板設置有多個功能鍵,可根據需要自由定義,實現調平系統的各種操作。這些都將使系統的可操作性得到大大提高。
車體調平裝置總體設計
火箭炮車體調平裝置總體設計包括:傾角傳感器的選型、數據處理與無線數傳電路設計。車體調平裝置機殼采用鋁合金整體加工,內置傾角傳感器、電路板、電池和無線發射模塊等,水平檢查座與機殼由螺釘固連,采用優質合金鋼,表面光潔度和水平度優于水準儀標準,發射機天線位于機殼的上方,使用時旋擰上,裝箱時可以折疊放倒或旋擰下。車體調平裝置控制原理如圖1所示。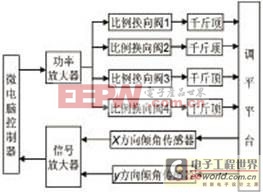
圖1 車體調平裝置控制原理圖
傾角傳感器及傳感器包數據輸出格式
傾角傳感器選型
傾角傳感器用于感應火箭炮車體的縱橫向傾斜度,基本技術要求:①精度高于±0.012°;②使用環境溫度為﹣40℃~﹢55℃。根據這些要求,選用北京星網宇達科技公司的TW-TS1110傾角傳感器。該傳感器內部采用高速數字處理器,對多維重力加速度信息進行處理與姿態角解算,并采用角度數字輸出模式,輸出速度為5Hz,測量范圍為±15°。測量精度:當傾角≤±5°時,精度為±0.005°;當傾角≤±15°時,精度為±0.01°;當傾角≤±30°時,精度為±0.035°。傳感器利用光刻電阻技術補償非線性誤差,解決了傳統傾角傳感器只有在小范圍才能保證精度的現象,使得傾角傳感器在全測量范圍內線性化,保持同一額定精度指標。傳感器還采用啟動零位測試補償技術,具有快速穩定輸出能力,單點重復性為0.0015°;采用動態數字濾波技術,輸出噪聲低,且具有較高的分辨率,分辨率為0.002°,傳感器內部采用動態零位與標度因數自校正技術。適合多種環境使用,使用環境溫度為﹣40℃~﹢55℃。
傳感器包數據輸出格式
1 發送數據格式定義
①ASCII碼發送格式(單角度):24 FF XX XX XX XX XX 0D 0A
說明——24:頭標識$;FF:角度值的符號位(+2b/-2d);XX:ASCII碼角度值(30~39);0D 0A:角度發送字尾標識符(換行,回車)。
②二進制碼發送格式(單角度):AA XX XX CC
AA:角度發送字頭標識符;XX:帶符號二進制數。5度傾角標度:6000bit/度;15度傾角標度:2000bit/度;30度傾角標度:1000bit/度;60度傾角標度:500bit/度。
CC:校驗碼;CC=數據字節1+數據字節2。










評論