基于ATmegal28L的智能探測(cè)車的設(shè)計(jì)與實(shí)現(xiàn)

3 軟件設(shè)計(jì)
系統(tǒng)軟件的主要功能是:能夠根據(jù)傳感器信息正確避開障礙物:小車與PC的無(wú)線通信;預(yù)先設(shè)定路線;測(cè)量物體的大小。為了提高小車避障的智能性,軟件設(shè)計(jì)采用了神經(jīng)網(wǎng)絡(luò)自學(xué)習(xí)。軟件設(shè)計(jì)的重點(diǎn)在于小車的神經(jīng)網(wǎng)絡(luò)訓(xùn)練程序和小車與PC機(jī)的無(wú)線通訊程序。
3.1 神經(jīng)網(wǎng)絡(luò)訓(xùn)練程序
BP神經(jīng)網(wǎng)絡(luò)應(yīng)用廣泛,具有較好的分類和記憶功能,同時(shí)有很強(qiáng)的容錯(cuò)性和魯棒性。采用兩層前向BP網(wǎng)絡(luò)實(shí)現(xiàn)多傳感器信息的融合,輸入層有6個(gè)節(jié)點(diǎn)(分別對(duì)應(yīng)6組傳感器。其中超聲波傳感器測(cè)得距離在30 cm之內(nèi)記為1),輸出層有4個(gè)節(jié)點(diǎn)(前進(jìn)F、左轉(zhuǎn)L、右轉(zhuǎn)R、后退B)。選取的輸入輸出樣本為: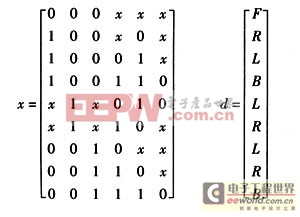
樣本確立后,需要進(jìn)行網(wǎng)絡(luò)訓(xùn)練。網(wǎng)絡(luò)訓(xùn)練就是對(duì)網(wǎng)絡(luò)的連接權(quán)系數(shù)進(jìn)行學(xué)習(xí)和調(diào)整,使該網(wǎng)絡(luò)實(shí)現(xiàn)給定的輸入輸出映射關(guān)系。權(quán)系數(shù)修改按照式
(1)進(jìn)行:
uij(t+1)=uij(t)+λ[dj(t)-yj(t)xi(t)+α△uij(t-1) (1)
式中:λ表示學(xué)習(xí)速率(取0.3);α表示學(xué)習(xí)動(dòng)量(取0.3);dj(t)和yj(t)分別表示j單元在t時(shí)刻的目標(biāo)輸出和實(shí)際輸出;xi(t)表示單元i在t時(shí)刻的輸入;△uij(t-1)表示前一次迭代中;;單元i和J連接權(quán)系數(shù)更新增量。
BP網(wǎng)絡(luò)算法采用C語(yǔ)言編程,訓(xùn)練好的網(wǎng)絡(luò)權(quán)系數(shù)存放于Flash內(nèi)存之中。采用的是離線訓(xùn)練方式。
3.2 小車與PC機(jī)的無(wú)線通訊程序
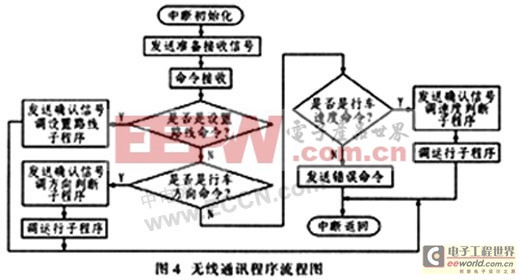
PC機(jī)在小車行駛過(guò)程中可以通過(guò)無(wú)線通訊對(duì)小車進(jìn)行控制。通訊采用中斷的方式,流程圖如圖4所示。
|
4 結(jié)束語(yǔ)
本文討論了基于ATmega128L的智能探測(cè)車的設(shè)計(jì)思路,對(duì)系統(tǒng)中的各個(gè)模塊接口作了簡(jiǎn)要描述,利用神經(jīng)網(wǎng)絡(luò)來(lái)增強(qiáng)小車的智能性,并提出了系統(tǒng)軟件的總體設(shè)計(jì)思想。該電路各部分功能模塊化,易于調(diào)試,并且容易擴(kuò)展其他功能。本設(shè)計(jì)的應(yīng)用前景廣闊,可用于骯臟、危險(xiǎn)等不適宜人類工作或者是人類難以到達(dá)的環(huán)境,可作為特殊應(yīng)用器材的載體工具,為無(wú)線檢測(cè)、信息傳輸及遠(yuǎn)距離控制技術(shù)提供了一個(gè)很好的應(yīng)用平臺(tái)。

評(píng)論