基于VC++的步進電機控制方法探討

步進電機是一種將電脈沖信號轉換為線位移或角位移的電機,但步進電機的控制通常都采用匯編語言或C語言進行軟件開發,本文結合SC3步進電機控制器及平移臺的控制開發為例,介紹了一種如何在Windows平臺下利用VisualC++6.0提供的串行通信控件MSComm來實現PC機與步進電機控制器之間的數據通訊,最終實現由PC機直接控制步進電機的方法,并詳細介紹了編寫串行通信程序的基本步驟和方法。調試結果表明:設計的控制程序簡單、易懂,工作可靠,且具有友好的人機交互界面。
步進電機是一種將電脈沖轉化為角位移的機電式數模轉換器,在控制系統中具有十分廣泛的用途,但傳統的步進電機的控制通常都采用匯編語言或C語言進行軟件開發,本文利用VC++提供的串行通信控件MSComm實現PC機與步進電機控制器之間的串行通信。與DOS下串行通信程序不同的是,Windows不提倡應用程序直接控制硬件,而是通過Windows操作系統提供的設備驅動程序來進行數據傳送。串行口在Win32中是作為文件來進行處理的,而不是直接對端口進行操作,對于串行通信,Win32提供了相應的文件I/O函數與通信函數,通過了解這些函數的使用,可以編制出符合不同需要的通信程序。
實現串行通信一般有3種方法:使用VC++提供的串行通信控件MSComm;在單線程中實現自定義的串口通信類;多線程下實現串行通信。結合實際情況,本系統采用VC++提供的串行通信控件MSComm來進行軟件編程,可以很方便地管理與控制計算機串口。
1、系統組成
由PC機控制步進電動機的系統如圖1所示。
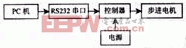
圖1PC機控制步進電機系統框圖
本系統的電機控制采用通用的RS232串口的異步通信。由于RS232早期是為促進公用電話網絡進行數據通信而制定的標準,其邏輯電平對地是對稱的,與TTL、MOS邏輯電平完全不同。邏輯0電平規定為+5~+15V之間,邏輯1電平規定為-5~-15V之間,因此,RS232驅動器與TTL電平連接必須經過電平轉換。
2、控制軟硬件的技術參數
本系統采用卓立漢光儀器有限公司生產的SC3步進電機控制器及平移臺,實現平移臺的三維控制(x,y,z)。利用RS232串口異步通信完成對步進電機的單步和連續移動控制,并且把電機的實際位置數據反饋給PC機處理。
電控平移臺的機械指標如下:
(1)精密電控旋轉臺:型號RSA200用于x軸。轉動范圍>±40°;傳動比180∶1;小步距0.0003125°;臺面直徑Φ200;分辨率0.00125°;重復定位精度0.005°;最大速度25/s;中心最大負載60kg。
(2)重載型電控平移臺:型號TSA300B,用于z軸。最小步距0.00315mm;重復定位精度0.005mm;加固定平移臺有效行程為150mm。
(3)超薄型電控平移臺:型號TSA30C,用于y軸。最小步距為0.002mm;重復定位精度0.005mm;有效行程30mm。SC3步進電機控制器設有手動和聯動方式,手動能設置的操作有:速度設定、歸零操作、方向設定、位移量設定等,聯機方式可以使電機的運動直接受應用軟件控制。由于是進行二次開發,因此應用程序必須嵌入原控制器的控制指令及協議。
該指令系統主要有以下幾條:
聯絡指令指令格式:“?R"CHR$(13)
該指令發出200ms以內SC3回送:“OK”CHR$(10),表示聯絡成功。
查詢指令指令格式:“?V”CHR$(13)
SC3接到該指令后回送:“Vnumber”CHR$(10)。其中number為ASC碼表示的SC3當前速度值。范圍0~255。
坐標查詢指令指令格式:“?X”CHR$(13)或“?Y”CHR$(13)或“?Z”CHR$(13)
SC3接到該指令后回送:“X+number”CHR$(10),或“Xnumber”CHR$(10),其他軸類似。其中number為以ASC碼表示的SC3當前坐標值,正負號代表當前位置在開機位置(0位)的正負方向的位置。
速度設置指令指令格式:“V”numberCHR$(13)
其中number為以ASC碼表示的速度設置值。范圍0~255。
歸零指令指令格式:“HX”CHR$(13)或“HY”CHR$(13)或“HZ”CHR$(13)
SC3接到此類指令后進行歸零操作。完成歸零操作后回送:“OK”CHR$(10),表示SC3歸零完畢。
零狀態查詢指令指令格式:“?H”CHR$(13)
SC3接到此類指令后回送:“H000”CHR$(10)
其中000的含義:
第一位數值:1表示z軸歸零成功,0表示z軸未歸零。
第二位數值:1表示y軸歸零成功,0表示y軸未歸零。
第三位數值:1表示x軸歸零成功,0表示x軸未歸零。
運行指令指令格式:“Xdirectionnumber”CHR$(13)或“Ydirectionnumber”CHR$(13)或“Zdirectionnumber”CHR$(13)

數字通信相關文章:數字通信原理
通信相關文章:通信原理








評論