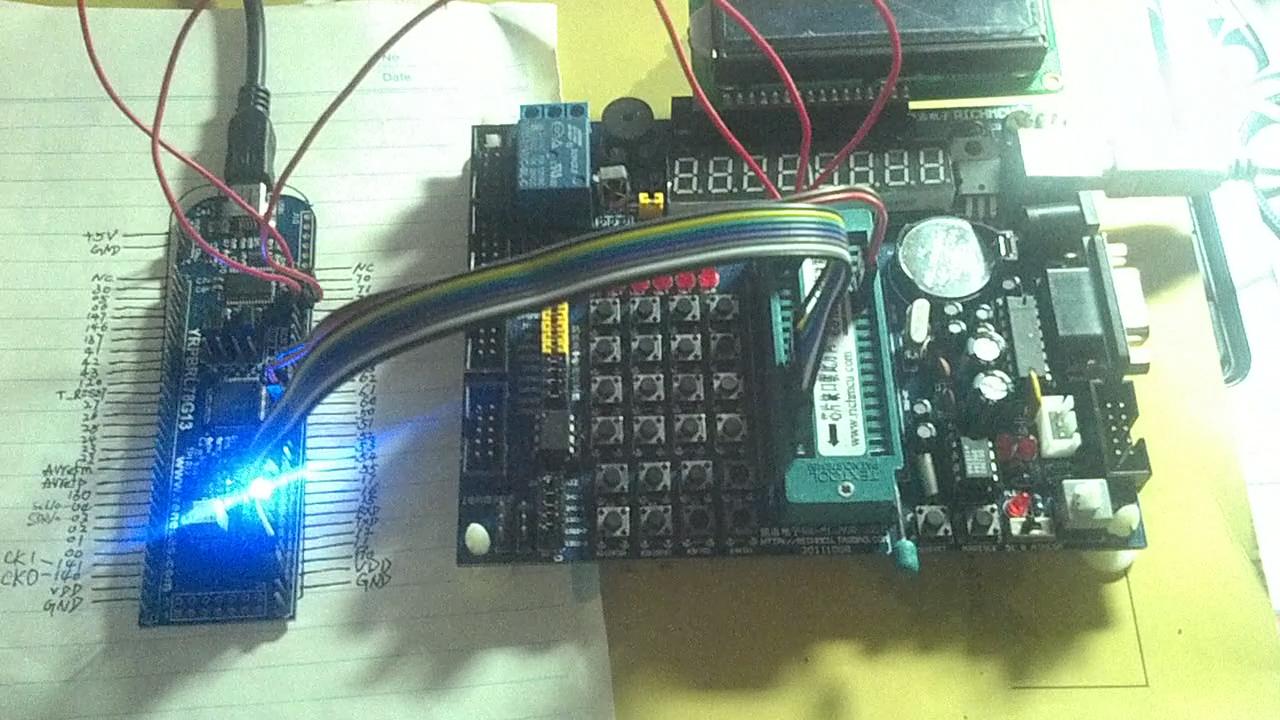
ATmega16L-EEPROM讀寫操作實驗

讀寫AVR單片機EEPROM實驗。
先向單片機EEPROM寫入254,然后讀出254,
并在數碼管上顯示出來
***************************************/
#includeiom16v.h>
const unsigned char duanma[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
const unsigned char weima[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};
unsigned char shu[8];
unsigned int num;
/****************************************
延時函數
****************************************/
void delay(unsigned char t)
{
unsigned char x,y;
for(x=t;x>0;x--)
for(y=100;y>0;y--);
}
/****************************************
顯示函數
****************************************/
void display(void)
{
unsigned char i;
for(i=0;i4;i++)
{
PORTB =0X00;
PORTA|=0X01;
PORTA=0XFE;
PORTB =weima[i];
PORTA|=0x02;
PORTA=0XFD;
PORTB=shu[i];
PORTA|=0X01;
PORTA=0XFE;
delay(4);
}
}
/***************************************
寫EEPROM
***************************************/
void write_eep(unsigned int add,unsigned int data)
{ //data為待寫數據,add為某單元地址
while(EECR(1EEWE)); //等待前一次寫操作完成
EEAR=add; //設定單元地址
EEDR=data; //將數據寫入EEDR
EECR|=(1EEMWE); //允許EEPROM操作
EECR|=(1EEWE); //開始EEPROM操作
}
/***************************************
讀EEPROM
***************************************/
unsigned char read_eep(unsigned int add)
{ //add為某單元地址
while(EECR(1EEWE));//等待前一次寫操作完成
EEAR=add; //設定單元地址
EECR|=(1EERE); //開始EEPROM寫操作
return EEDR; //返回讀出的數據
}
/***************************************
數據轉換子函數
***************************************/
void change(unsigned int i)
{
shu[0]=duanma[i/1000];
shu[1]=duanma[i/100%10];
shu[2]=duanma[i%100/10];
shu[3]=duanma[i%10];
}
/***************************************
端口初始化
***************************************/
void init_port(void)
{
PORTA=0XFF;
DDRA=0XFF;
PORTB=0XFF;
DDRB=0XFF;
}
/***************************************
MAIN
***************************************/
void main(void)
{
init_port();
write_eep(488,254);
delay(20);
num=read_eep(488);
delay(20);
change(num);
while(1)
{
display();
}
}

評論