如何構造一個51單片機的實時操作系統

2 實時操作系統要不要占先
由上面的分析,如果要保持一個函數可重人,就得使用靜態變量,系統的RAM資源將是一個嚴峻的考驗;如果使用臨界區來保護運行環境,系統的實時性又得不到保證,而且有將占先式任務調度轉為非占先任務調度之虞。顯然,使用靜態變量簡單,但有更多的不適用性,對將來功能的調整也是一個阻礙,一般不被采用。那么,就只能從環境保護上來下功夫了,但是果真只能以進入臨界區犧牲系統的實時性來保證任務不被占先?下面看看臨界保護這一方法的基本思路:
①在一個任務中,如果局部變量在其作用域內不被占先切換,則這些變量在任務被剝奪了CPU控制權后,不關心其值也不會影響任務的正確執行;
②使用臨界區保護,可以達到上面所提到的要求;
③由此導致的實時性能與占先切換的減弱可以接受。由此可知,不被占先是任務保護局部變量的關鍵。既然如此,何不舍棄占先式的任務調度?這不失為一個好的出發點。針對Keil C51,非占先式任務調度,可能是一種更好的方法,更能協調51系列單片機的既定資源。下面編寫這樣一個系統:
①使用非占先式任務調度;
②可以在小容量的芯片中使用,開發目標是,即使是8051這樣小的芯片,也可使用這個實時操作系統;
③支持優先級調度,盡可能保證其實時性。
3 實時操作系統的實現
基于以上的分析與目的,近日完成了這個操作系統。在堆棧上借用RTx的管理方法,即當前任務使用全部的堆空間
3.1 堆棧的初始化與任務的創建
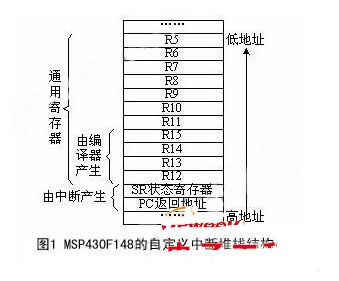
堆棧的初始化實際是初始化0STaskStackBotton數組,并將當前任務指定為空閑任務,下一個運行任務指定為最高優先級任務,即優先級為零的任務。初始化時,將SP的值存人OSTaslkStackBotton[O],SP+2的值存入OSTaskStacKBotton[1],依此類推。而任務是調用0STa-skCreate函數建立的。實際上只是將任務(假設為n號任務)的地址填人到對應OSTaskStackBotton[n]所指向的位置,并將SP向后移動2個字節,
為什么要以這樣一種規律而不是其他的方式呢?這是由于在任務建立后,還未進行任務調度之前,各任務的堆棧實際上是它們自身的地址,因而其堆棧深度為2,為了程序的簡便而直接填入。
void main(void){
OSInit(); /*初始化OSTaskStackBcBotton隊列*/
TMOD=(TMOD0XFO)│ 0XOl;
TL0=0xBF;
TH0=0xFC;
TRO=1;
ETO=1;
TFO=O:
OSTaskCreate(TaskA,NULL,0);
OSTaskCreate(TaskB.NULL,1);
OSTaskCreate(TaskC,NULL,2);
OSStart();
上面這段代碼中,所有任務建立后,便調用OSStart()開始任務調度。OSStart()是一個宏定義,如下所示:
#deflne OSStart() d0{\
OSTaskCreate(TaskIdle,NULL,OS_MAX_TASKS);\
EA=l:\
return;\
}while(O)
首先,它創建了一個空閑任務并打開中斷,然后便返回。返回到哪里了呢?我們知道,空閑任務是優先級最低的任務,當調OSTaskCreate建立時,會將其地址填人到SP的位置,并把SP向后移動2個字節(見圖2及說明),因而此時處在堆棧頂端的,一定是空閑任務Taslddle。這就使得這里的return一定會返回到空閑任務。至此,系統進入正常運行狀態。
3.2 任務的切換
任務的切換分兩種情況,在當前任務優先級低于下一個取得CPU控制權的任務時,將下一個取得CPU控制權的任務的棧頂到當前任務的棧頂之間的內容向RAM空間的高端搬移,以空出全部的RAM空間作下一個任務的堆空間,同時更新對應的OSTaskStackBotton,使其指向新的正確任務的堆棧棧底。如果當前任務的優先級高于下一個任務的優先級,則作相反的搬移,
所有任務必須主動調用OSSleep,放棄CPU的控制權。任務調用OSSleep后,將選擇優先級最高的就緒任務運行。
結 語
系統完成后,內核的代碼量在400多個字節左右,占用1個定時器中斷及小量的內存空間。系統設置容量為8個任務,用戶實際可用任務為7個,能夠滿足一般需求,也達到了在小容量芯片中應用的開發要求。由于沒有采用占先式的任務調度,除開全程相關的個別任務的一些局部變量外,其他局部變量已經不存在覆蓋關系,由于是任務主動放棄CPU控制權,對于個別需要保護的變量單獨進行處理也變得容易。在系統中,全程不需要反復地開關中斷,實時性能也很好。對個別時序要求嚴格的外設(如DSl8820)除外。









評論