51單片機數碼管動態顯示程序

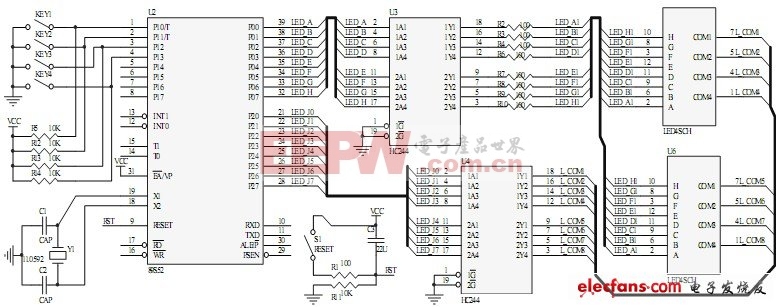
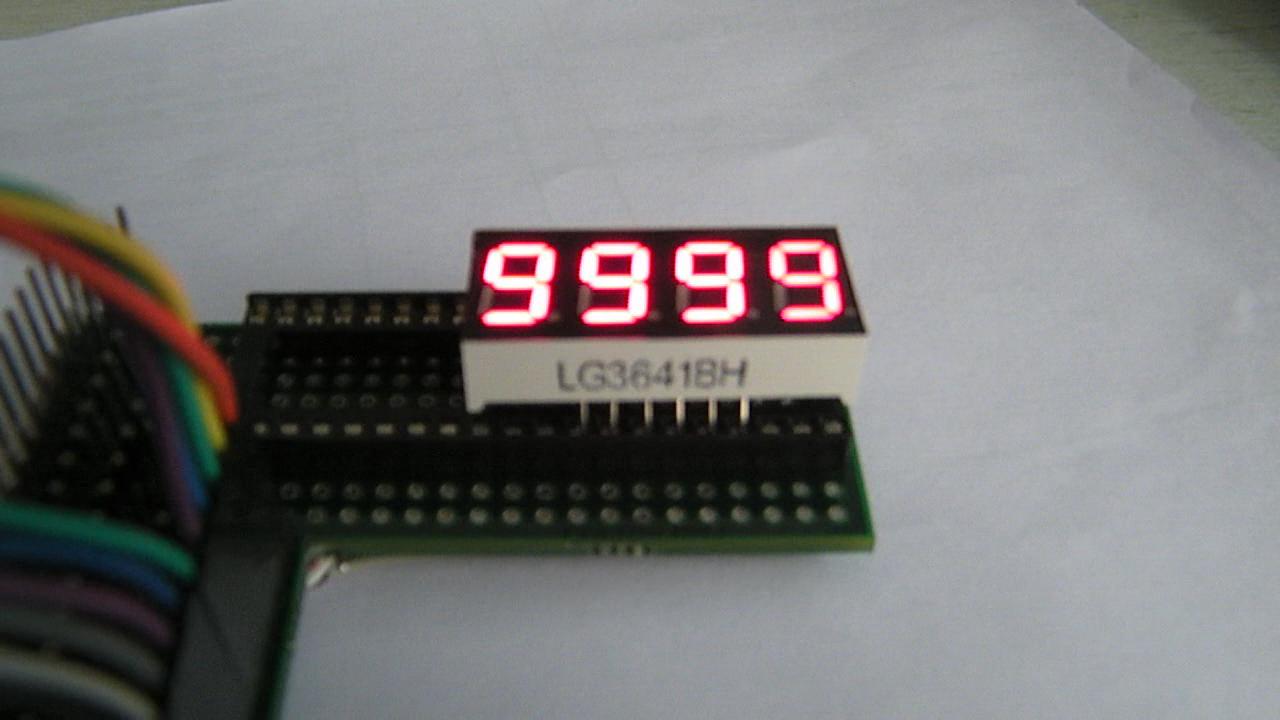
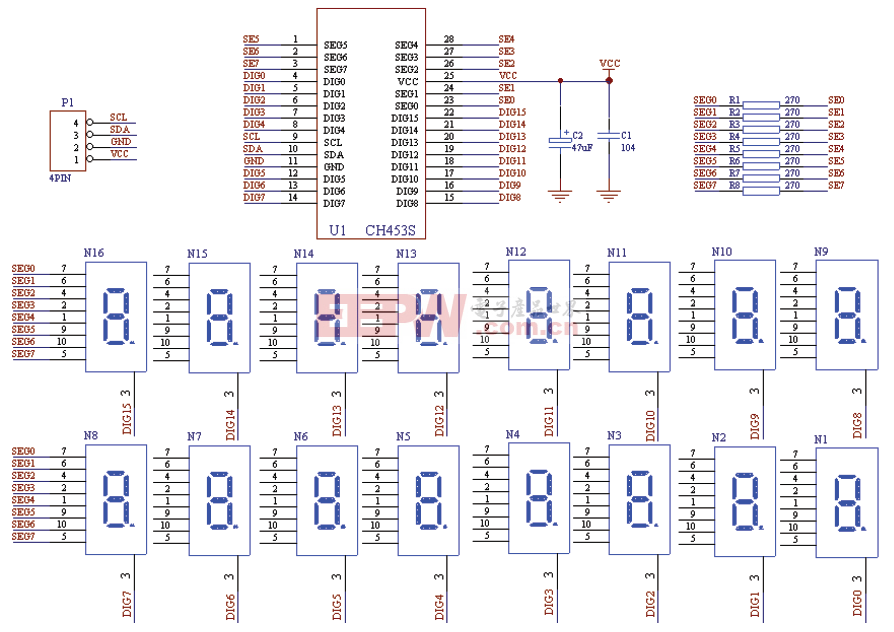
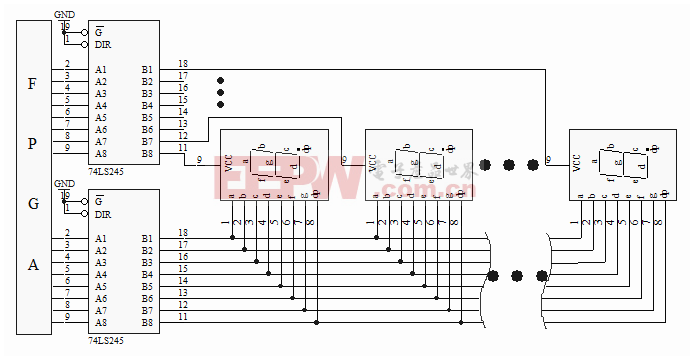
單片機數碼管動態顯示程序實驗,數碼管顯示一般分靜態顯示及動態顯示兩種驅動方式,靜態顯示占用口線比較多,本文介紹的是如何實現數碼管動態顯示,應該說數碼管動態顯示是單片機外部指令輸出的重要途徑,因此如何設計數碼管以及數碼管的工作原理、數碼管顯示的方法、數碼管顯示的抗干擾設計等在單片機系統設計中占有重要地位。這個例子在系統硬件的基礎上設計了軟件查詢程序、軟件延時程序(防止干擾),大致講述了一種數碼管動態顯示的工作原理與讀取方式。
s1 bit p0.0 ;數碼管位定義
s2 bit p0.1
s3 bit p0.2
s4 bit p0.3
s5 bit p0.4
s6 bit p0.5
s7 bit p0.6
s8 bit p0.7
LED_data equ p2 ;數碼管數據定義
org 00h ;程序開始
jmp main ;主程序開始處
org 030h ;主程序從30H開始
main: MOV sp,#30h ;設置堆棧
lcall rest ;調用初始化程序
lcall pro_8led ;調用數碼管顯示程序
jmp main ;返回
;********* 初始化程序 **************
rest:MOV a,#00h ;清寄存器
MOV b,#00h ;清寄存器
MOV p0,#0 ;禁止數碼管顯示
MOV p2,#255 ;
MOV p1,0ffh ;禁止LED顯示
clr beep ;禁止蜂鳴器
ret ;返回
;******** 數碼管顯示程序 ***************
pro_8led:
MOV b,#32 ;一共顯示32個數字
clr psw.3 ;重新設置寄存器組
setb psw.4 ;
MOV r0,#00h ;數據顯示從0開始
MOV r1,#01h ;數碼管從第1個開始
loop:MOV p0,r1 ;點亮當前數碼管
MOV a,r0 ;準備第一個數據
MOV dptr,#tab_nu ;獲得表頭
MOVc a,@a+dptr ;得到第一個數據
MOV led_data,a ;輸出到顯示數據口
lcall delay ; 500 ms 延時
lcall delay ; 1 s 延時
inc r0 ;準備下一個數據
MOV a,r1 ;準備下一位數碼管
rlc a ;設置下一個數碼管
jc c1 ;8位全部顯示,轉移
MOV r1,a ;否則,設置下一位
djnz b,loop ;32個數沒有顯示完,返回顯示
ret ;否則返回主程序
c1: MOV r1,#1 ;8位顯示完,重新開始循環
clr c ;設置顯示位
djnz b,loop ;32位顯示完則返回重新顯示
ret ;否則返回到主程序
;************* 數碼管顯示 *******************************
;************* 軟件延時 500ms *****************************
delay: push psw ; 保存原來的寄存器內容
clr psw.3 ;
clr psw.4 ; 設置新的寄存器組
MOV r0,#2 ; 延時參數1
MOV r1,#250 ; 延時參數2
MOV r2,#2 ; 延時參數3
dl1:djnz r0,dl1 ; 延時循環1
MOV r0,#250 ;
dl2:djnz r1,dl1 ; 延時循環2
MOV r0,#240 ;
MOV r1,#248 ;
dl3:djnz r2,dl1 ; 延時循環3
nop ; 定時精度調整
pop psw ; 恢復原來的寄存器
ret ; 返回
;**********************************************************
;**********************************************************
;這是數字顯示表格,其中 帶小數點的數字比不帶小數點的數字大16
; 比如 0 的顯示代碼為 0;那么 0.的顯示代碼為 16;如此類推
tab_nu:
db 0c0h, 0f9h, 0a4h, 0b0h, 99h , 92h , 82h, 0f8h ; 數字0-7 不帶小數點代碼
db 80h , 90h, 88h , 83h , 0c6h, 0a1h, 86h, 8eh ; 數字8-f 不帶小數點代碼
db 40h , 79h, 24h , 30h , 19h , 12h , 02h, 78h ; 數字0-7 帶小數點代碼
db 00h , 10h, 08h , 03h , 46h , 21h , 06h, 0eh ; 數字8-f 帶小數點代碼

51單片機相關文章:51單片機教程
蜂鳴器相關文章:蜂鳴器原理






評論