基于ATmega8的大功率直流電機控制系統設計與實現

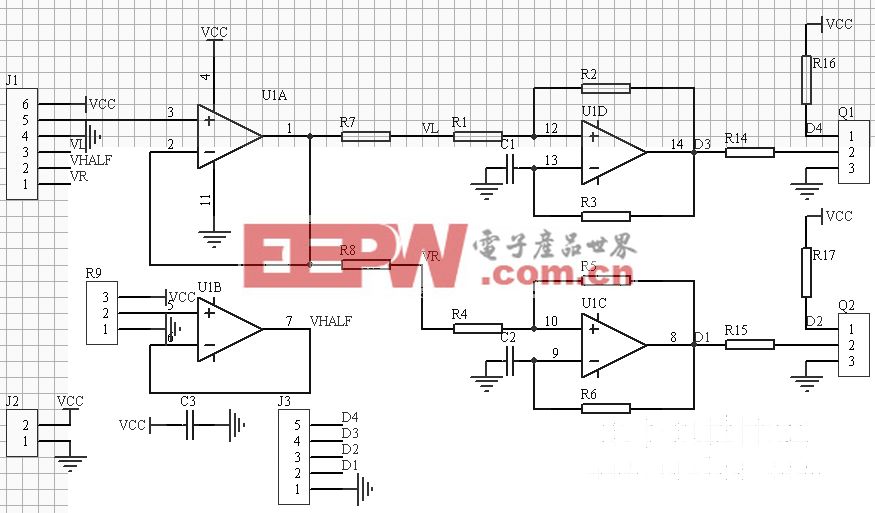
3、電機驅動和電流檢測電路
主要是通過MOSFET的導通和關斷將直流逆變為交流電,通過變壓器將逆變過后的交流電整流為直流電,在變壓器中我們實現了升壓的過程。其中最重要的是要實現H橋中MOSFET控制時要求對管開通和關斷的時間要一樣。這樣才能保證變壓器不處于飽和狀態。從而實現26V直流電升壓到180V的功能。為了便于我們對電機的控制,我們在這里加上了霍爾傳感器來實現對電流的檢測。
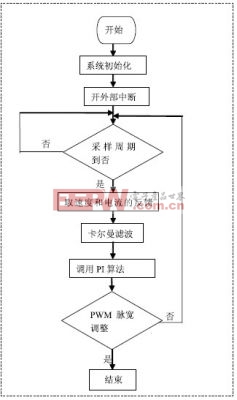
圖2 主程序流程圖
4、速度檢測電路
將信號盤安裝在電動機的轉軸上,光電轉速傳感器正對著信號盤。當信號盤轉動時,光電元件就會輸出周期性脈沖信號。信號盤旋轉360度產生的脈沖數,和其上面的齒數相等。因此脈沖信號的頻率大小就反映了電動機轉速的大小。
三、軟件設計
主程序是一個循環程序,其主要思路是,首先先設定好速度初始值和電流初始值,然后將檢測的輸入信號經過卡爾曼濾波器濾波后得到輸入信號的值,再將著兩個值分別和設定值相比較得到一個誤差值,將誤差送給電流轉速閉環PI調節(PI調節器輸出計算和PWM脈寬調節)。PI調節器輸出計算在轉速值和電流值更新后進行,否則輸出脈沖只根據PI運算的歷史值變化,PWM脈寬調節是脈寬從當前值平滑變化到PI調節器計算出的新值,實現平滑調速。
四、結論
本系統通過對直流電動機數學模型分析,建立了勵磁直流電動機的電樞電壓結合勵磁電壓的電動機控制方案,并對勵磁直流電動機的控制方法進行了改進,采用了轉速環-電流環雙閉環反饋控制系統,通過PI算法調節電動機的轉速。此設計采用的是AVR單片機為控制器,輸入到AVR轉速信號為數字信號,電機電流信號通過AVR內的模數轉換器轉換為數字信號,這樣為在軟件上實現閉環反饋控制算法提供了保證。系統經過軟硬件設計調試證明運行可靠、穩定,達到了預期的目標。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理


評論