基于51單片機的汽車防碰撞系統的設計

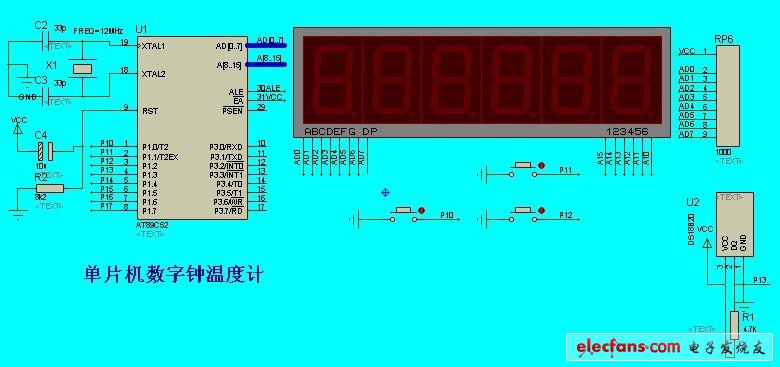
單片機轉化為10進制后使顯示電路動態顯示障礙物距離S,同時判斷如S小于設定門限值K,則使報警單元的紅色LED燈持續閃爍,蜂鳴器連續長鳴報警,提醒駕駛員及時采取防碰撞措施。一定時間后駕駛員仍未采取有效措施時,單片機使執行單元緊急制動剎車,主動避免發生碰撞。
汽車倒車時,車速較低,超聲波模塊代替激光測距模塊工作。在單片機IO口大于10US的高電平信號控制下,自動向后發射8個40KHZ的方波。
超聲波返回后單片機由INT0引腳高電平持續時間測得超聲波往返時間,通過換算得到汽車與障礙物之間的距離。之后利用系統的各個單元實現與激光測距相同的防碰撞工作。
5.系統軟件設計
圖4為超聲波測距軟件設計,系統啟動后,超聲波模塊向后發射超聲波,接收超聲波的同時開啟定時器定時,由測量到的時間T計算得到障礙物距離S,顯示單元動態顯示連續變化的距離S.如果距離S小于設定的門限值,則系統進行聲光報警,LED燈不斷閃亮,蜂鳴器持續鳴響,提醒駕駛員及時采取措施避免碰撞。延時1秒后如果距離S仍小于設定的門限值,表明駕駛員未進行任何有效操作,故系統控制汽車緊急制動,主動避免防碰撞的發生。
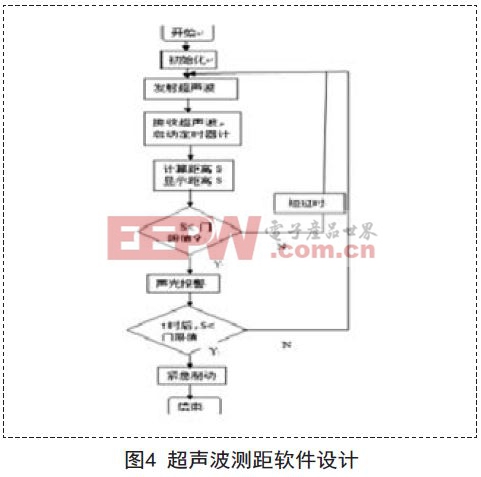
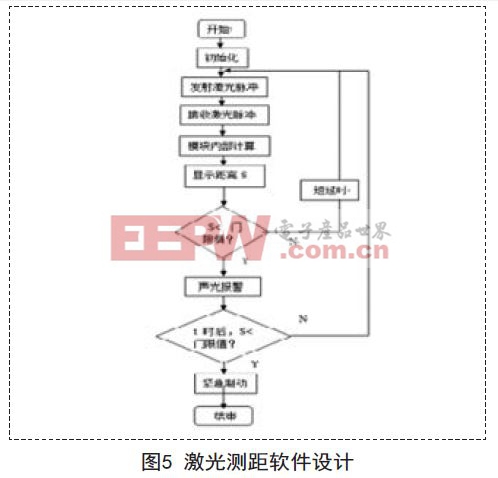
圖5為激光測距軟件設計,激光模塊發射接收激光脈沖后,由模塊內部電路同時完成計算距離S工作。如果S小于門限值則進行報警。
6.結論
系統選用了激光測距傳感器和超聲波測距傳感器相結合的組合式測距方式。
單一傳感器的測距方式受傳感器的應用條件限制較大,難以滿足汽車復雜的行駛狀態和多變的外部環境,故本系統的優點顯而易見。在汽車前進,倒車,低速,高速等多種行駛狀態,本系統均能對汽車周圍環境的障礙物進行有效的監測和測距,使汽車主動進行防碰撞,防止交通事故的發生,具有廣闊的研究前景

51單片機相關文章:51單片機教程
單片機相關文章:單片機教程
單片機相關文章:單片機視頻教程
單片機相關文章:單片機工作原理
蜂鳴器相關文章:蜂鳴器原理







評論