基于MCU控制的自動平衡吊具

在航空航天、精密機(jī)械等重要領(lǐng)域,隨著關(guān)鍵部件質(zhì)量要求的提高,對起重吊裝和裝配操作提出了很高的要求。自動平衡吊具是一種由微處理器控制的全自動吊具,它可以在起吊過程中快速的自動調(diào)平,使被吊物的質(zhì)心在吊具本身得到調(diào)整,從而使整個起吊過程中被吊物始終保持在水平狀態(tài);也可以使被吊物在起吊過程中快速地調(diào)姿,使被吊物保持一個任意的預(yù)先設(shè)定的姿態(tài)。滿足上述領(lǐng)域中對起重吊裝的高要求,是實現(xiàn)安全、高效、自動吊裝裝配作業(yè)的重要技術(shù)手段。
1 吊具機(jī)械結(jié)構(gòu)及原理簡述
為進(jìn)行快速的裝配體設(shè)計,吊具機(jī)械結(jié)構(gòu)使用Solid Works進(jìn)行裝配體建模,各部分的配置及結(jié)構(gòu)如圖1所示。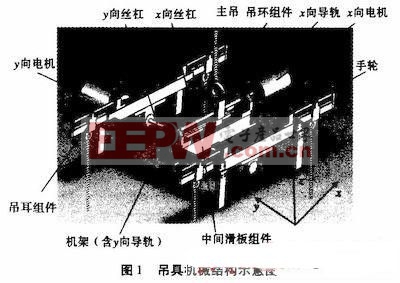
吊具本身由機(jī)架(兼做y向?qū)к?、y向電機(jī)、y向絲杠、中間滑板組件(含x向?qū)к?、x向電機(jī)、x向絲杠、吊耳組件(4個)、手輪(4個)、吊環(huán)組件、吊索等部分組成。
傾斜傳感器安裝在機(jī)架上,傳感器的工作方向分別與吊具的x、y方向平行,系統(tǒng)上電后,系統(tǒng)控制器讀取傾斜傳感器測出的機(jī)架傾斜數(shù)據(jù)(傳感器的俯仰角和橫滾角的數(shù)據(jù)分別代表吊具在x、y向的機(jī)架傾斜狀況),當(dāng)測出的數(shù)據(jù)需要吊索沿x方向移動時,系統(tǒng)控制器根據(jù)吊索的當(dāng)前位置和需要的位移量,計算出對應(yīng)的速度和方向的控制信號,x向電機(jī)驅(qū)動電路根據(jù)系統(tǒng)控制器輸出的控制信號,以合適的電機(jī)軸旋轉(zhuǎn)方向和轉(zhuǎn)速啟動x向電機(jī)運轉(zhuǎn),電機(jī)旋轉(zhuǎn)x向絲杠帶動吊環(huán)組件完成指定幅度的移動;當(dāng)需要吊索沿y方向移動時,y向電機(jī)驅(qū)動電路根據(jù)系統(tǒng)控制器輸出的控制信號以合適的電機(jī)軸旋轉(zhuǎn)方向和合適的轉(zhuǎn)速啟動y向電機(jī),電機(jī)旋轉(zhuǎn)y向絲杠帶動中間滑板組件完成指定幅度的移動。
在吊具運行狀態(tài)下,x,y向的控制過程是同時且連續(xù)進(jìn)行的,直至吊具調(diào)平。
轉(zhuǎn)動手輪,可以帶動小絲杠調(diào)節(jié)滑塊在x軸方向上的位置,以適應(yīng)不同大小的被吊件。
2 控制系統(tǒng)概述
系統(tǒng)結(jié)構(gòu)如圖2所示,這里把整個系統(tǒng)按照檢測、控制、通信、執(zhí)行的順序劃分成四大塊,各部分的工作如下: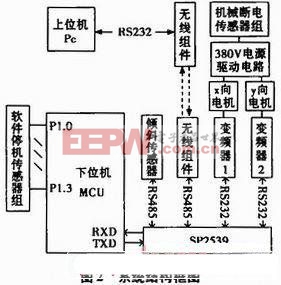
檢測部分:主要包括傾角和接近傳感器等硬件。其中前者用于獲得吊具的俯仰角和橫滾角并傳送給SP2539的子串口,為下位機(jī)判斷電機(jī)轉(zhuǎn)動方向,計算移動行程提供依據(jù)。后者分為軟件停機(jī)傳感器組和機(jī)械斷電傳感器組,采用雙重制動策略,保障吊具在使用過程中平穩(wěn)調(diào)平和安全使用。
控制部分:單片機(jī)嵌入式系統(tǒng)是控制機(jī)構(gòu)的核心部件,首先接收檢測部分的輸出值,包括吊具的實時姿態(tài)、軟件停機(jī)傳感器組狀態(tài),同時調(diào)用子程序,處理輸入信號并給出動作信號給1、2號變頻器,使x,y向電機(jī)遵循指令進(jìn)行動作。最后,單片機(jī)還需要和上位機(jī)設(shè)備進(jìn)行交流,方便操作人員隨時掌握系統(tǒng)的狀態(tài)。
通信部分:這部分解決單片機(jī)分別與檢測機(jī)構(gòu)、上位機(jī)以及執(zhí)行機(jī)構(gòu)的信息傳輸。具體的講,主要是指單片機(jī)與傾角和接近傳感器、上位機(jī)調(diào)平控制指令、1、2號變頻器輸出頻率、角度顯示以及SP2539串口擴(kuò)展系統(tǒng)之間的信息傳輸。

評論