AVR單片機的天然氣發動機系統設計


圖10 ECU噴氣驅動電路
(3) 點火線圈
發動機的電火花點火是通過一整套電器設備和機件,在相互配合下,將汽車的低壓電變為高壓電,利用裝在汽缸燃燒室內的火花間隙放電,產生電火花,將可燃混合氣點燃做功,并能按發動機工作要求而自動調節點火時間,使點火可靠、準確。點火系統應在發動機各種不同工況和使用條件下,均能保證正確而可靠的點燃混合氣。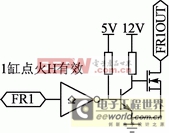
圖11 ECU點火驅動電路
本系統由點火MCU輸出的控制信號經過驅動電路驅動功率晶體管控制點火線圈初級回路的通斷,從而使次級感應出高壓,完成發動機電子控制點火。圖11為ECU點火驅動電路。
5 實驗監控系統
發動機實驗監控系統一般包括直接對發動機控制的電控單元以及人機交互系統,所以一般分成兩級結構。下位機由傳感器、執行結構及電控單元組成,上位機由PC機構成。如圖12所示,系統監控軟件為模塊化結構設計,便于功能的實現。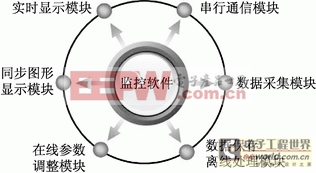
圖12 試驗監控系統軟件結構示意圖
監控系統軟件采用VB軟件編制,利用VB中的MSComm控件可以很方便地提供串行端口通信功能。監控軟件主要實現的功能包括:參數采集、數據實時顯示、控制參數在線調整、數據圖形化顯示、數據離線圖形化顯示、數據保存、報警、打印等。
監控系統下位機電控單元采用AVR系列ATmega8單片機,通過串行通信模塊實現與上位機(PC機)的數據傳輸。電控單元通過傳感器采集發動機運行時的各種工況參數傳給上位機,以及驅動執行結構(噴嘴、點火線圈等)按照上位機傳來的控制參數動作,軟件采用C語言編制。在微機和單片機通信中,采用軟件握手協議。
6 臺架實驗
(1) 怠速控制系統
如圖13所示,怠速控制主要由主MCU采用經典PID控制策略來完成。PID控制允許工程技術人員以簡單直接的方式來調節系統,而且在很寬的條件范圍內都能保持很好的魯棒性。PID控制器是整個怠速控制系統的核心。在怠速閉環控制中需要用到的基本控制量是怠速轉速偏差,即怠速目標轉速與發動機實際轉速之差,通過PID控制器的計算,得出步進電機的動作步數以及動作方向,改變旁通空氣進氣量,從而控制發動機轉速。
圖13 怠速閉環控制原理(PID)
(2) 電控點火系統
電控點火系統的工作原理:首先對轉速信號和負荷信號進行采樣, 送入計算單元,根據存儲在單片機中的點火MAP圖,采用插值和查表方法,確定最佳點火提前角;控制系統同時采集發動機其他工作參數信號,根據這些信號查出點火提前角的修正值,將最佳點火提前角修正后轉化為相應的點火延遲時間。當點火基準信號(點火基準信號就是延遲基準信號,它一般是一個曲軸位置信號)到來時,控制系統計數器開始計數,計數結束后,ECU通過接口發送點火信號,點火驅動電路得到這個信號后初級點火線圈開始閉合[5]。
此電控系統中點火提前角的控制以發動機轉速和進氣壓力為基本輸入信號,通過查詢儲存在點火單片機中的點火MAP圖得出基本點火提前角,再通過發動機冷卻水溫、天然氣壓力、氧傳感器等信號進行修正。最終確定發動機當前工況下的最佳點火提前角,然后由兩個計數器相互配合來完成點火提前角的控制。作為點火信號產生基準的是霍爾傳感器輸出的曲軸位置信號,在分電器內安裝有產生該信號的信號齒盤。霍爾傳感器每隔180°CA
(CA是發動機的曲軸轉角)產生一個信號(下降沿有效),位置是壓縮上止點前86°CA。圖14為點火的時序圖。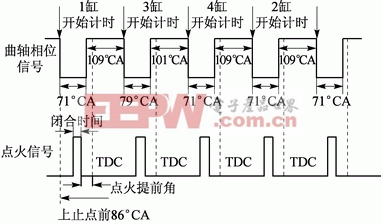
圖14 點火信號的波形示意圖
(3) 燃氣噴射控制系統
本電控系統中,選取了較為簡單和實用的速度密度方式,通過發動機轉速和進氣歧管壓力得出進氣空氣量。
由于燃氣噴射壓力一定,所以發動機的供氣量取決于噴射閥的噴射時間。噴射時間T由公式(1)得出:
主站蜘蛛池模板:
巴中市|
远安县|
三原县|
分宜县|
天门市|
庆元县|
来宾市|
鸡东县|
鲁甸县|
翁牛特旗|
双流县|
宝坻区|
苍南县|
水城县|
鲁甸县|
剑河县|
琼海市|
信宜市|
甘孜县|
长沙县|
靖安县|
凤台县|
治多县|
马山县|
张家口市|
本溪|
比如县|
浦东新区|
阿瓦提县|
古蔺县|
迁安市|
北海市|
西青区|
许昌市|
花莲市|
肃南|
隆化县|
阿尔山市|
沭阳县|
怀化市|
绵竹市|

關鍵詞:
電控系統 CNG發動機 AVR單片機
相關推薦
-
keyboard007 | 2025-05-05
-
-
-
-
-
zhujun615 | 2013-03-22
-
-
-
-
-
-

-

-
-

-
-
-
keyboard007 | 2025-04-28
-
-
-
評論