AVR微控制器在BLDC電機控制中的應用

鑒于此,我們可以得出結論:驅動BLDC電機需要梯形電壓;而驅動BLAC電機需要正弦電壓。
總之,BLDC電機為制造商帶來了尺寸、重量和性能方面的好處,但目前存在一大挑戰(zhàn),即如何把成本降低到與舊式、較重產品相比更具有竟爭力的價位。
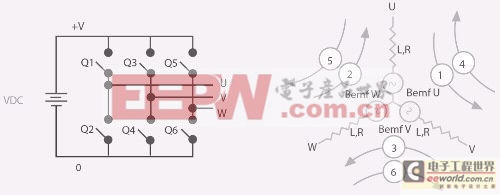
(a) 功率橋 (b) 線圈的電流行為
圖2 無刷電機輸出信號的產生
BLDC電機驅動方法
BLDC電機可帶3個霍爾傳感器,這些傳感器和與轉子位置相關的線圈U、V和W 3個電壓保持同步。表1說明了哪個線圈必須按照霍爾傳感器的指示被激活。電機的電氣周期分為6個步驟,每一步都有一個霍爾傳感器“值”。圖2(a) 所示為功率橋的拓撲,圖2(b)顯示了每一步有哪些線圈被加電。例如,在步驟1期間,電壓施加在電機的U和V輸出端之間,從U流向V端的電流如圖2(b)中的箭頭1所示。
表1 霍爾傳感器表
如霍爾傳感器表所示,在每一步換向過程中,通過關閉兩個開關在電機兩個輸出端之間施加電壓。利用這種控制方式,電壓將通過霍爾傳感器與轉子位置保持同步。事實上,在這一點上,BLDC 電機具有與DC電機相同的行為,其速度與電壓成比例。然而,為了控制電機速度,系統(tǒng)會通過發(fā)送PWM信號激活開關,來調節(jié)施加的電壓。V和W輸出端產生“延時”±120°的類似波形。另外,還需注意步驟3和步驟6期間產生的反電動勢(BEMF)。
無傳感器電機
無傳感器電機的控制同步化是通過在U、V、W這些輸出端沒有被激活(如U輸出端的步驟3和步驟6)的步驟期間,監(jiān)控U、V和W的反電動勢信息來完成的,其中包含了反電動勢零交叉點的檢測,并可以借助模擬比較器或利用軟件加ADC輸入來完成,如圖3所示。
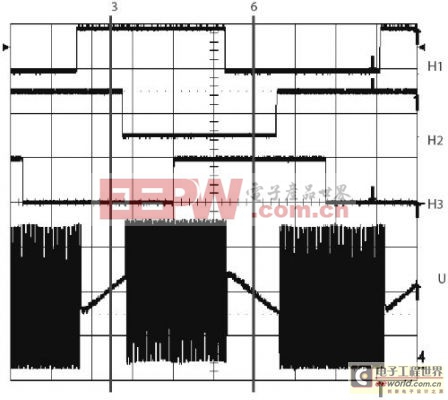
圖3 BLDC電機在步驟3和步驟6期間的U相及其BEMF波形
AVR解決方案
AVR產品組合提供了能夠驅動汽車、工業(yè)控制及白色商品的BLDC電機的各種平臺。ATmega16/32/64M1是針對汽車應用而開發(fā)的,其中包括驅動DC或 BLDC/BLAC電機的功率級控制器、用于反電動勢感測的模擬比較器(無傳感器應用)、故障輸入以及用于電流和電壓測量的ADC等器件,對于上述的無刷電機控制系統(tǒng)能帶來切實幫助。

單片機相關文章:單片機教程
單片機相關文章:單片機視頻教程
單片機相關文章:單片機工作原理



評論