PWM控制電路原理與電路設計FPGA

在直流伺服控制系統中,通過專用集成芯片或中小規模的數字集成電路構成的傳統PWM控制電路往往存在電路設計復雜,體積大,抗干擾能力差以及設計困難、設計周期長等缺點因此PWM控制電路的模塊化、集成化已成為發展趨勢.它不僅可以使系統體積減小、重量減輕且功耗降低,同時可使系統的可靠性大大提高.隨著電子技術的發展,特別是專用集成電路(ASIC)設計技術的日趨完善,數字化的電子自動化設計(EDA)工具給電子設計帶來了巨大變革,尤其是硬件描述語言的出現,解決了傳統電路原理圖設計系統工程的諸多不便.針對以上情況,本文給出一種基于復雜可編程邏輯器件(CPLD)的PWM控制電路設計和它的仿真波形.
1 PWM控制電路基本原理
為了實現直流伺服系統的H型單極模式同頻PWM可逆控制,一般需要產生四路驅動信號來實現電機的正反轉切換控制.當PWM控制電路工作時,其中H橋一側的兩路驅動信號的占空比相同但相位相反,同時隨控制信號改變并具有互鎖功能;而另一側上臂為低電平,下臂為高電平.另外,為防止橋路同側對管的導通,還應當配有延時電路.設計的整體模塊見圖1所示.其中,d[7:0]矢量用于為微機提供調節占空比的控制信號,cs為微機提供控制電機正反轉的控制信號,clk為本地晶振頻率,qout[3:0]矢量為四路信號輸出.其內部原理圖如圖2所示. 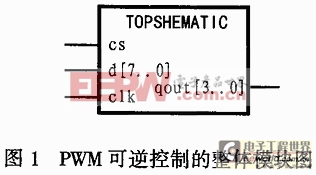
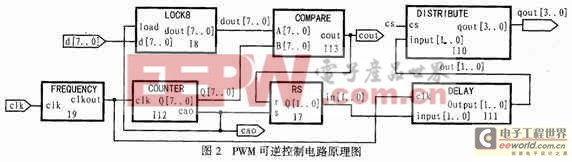
該設計可得到脈沖周期固定(用軟件設置分頻器I9可改變PWM開關頻率,但一旦設置完畢,則其脈沖周期將固定)、占空比決定于控制信號、分辨力為1/256的PWM信號.I8模塊為脈寬鎖存器,可實現對來自微機的控制信號d[7:0]的鎖存,d[7:0]的向量值用于決定PWM信號的占空比.clk本地晶振在經I9分頻模塊分頻后可為PWM控制電路中I12計數器模塊和I11延時模塊提供內部時鐘.I12計數器在每個脈沖的上升沿到來時加1,當計數器的數值為00H或由0FFH溢出時,它將跳到00H時,cao輸出高電平至I7觸發器模塊的置位端,I7模塊輸出一直保持高電平.當I8鎖存器的值與I12計數器中的計數值相同時,信號將通過I13比較器模塊比較并輸出高電平至I7模塊的復位端,以使I7模塊輸出低電平.當計數器再次溢出時,又重復上述過程.I7為RS觸發器,經過它可得到兩路相位相反的脈寬調制波,并可實現互鎖.I11為延時模塊,可防止橋路同側對管的導通,I10模塊為脈沖分配電路,用于輸出四路滿足設計要求的信號.CS為I10模塊的控制信號,用于控制電機的正反轉.
2 電路設計
本設計采用的是Lattice半導體公司推出的is-plever開發平臺,該開發平臺定位于復雜設計的簡單工具.它采用簡明的設計流程并完整地集成了Leonardo Spectrum的VHDL綜合工具和ispVMTM系統,因此,無須第三方設計工具便可完成整個設計流程.在原理設計方面,本設計采用自頂向下、層次化、模塊化的設計思想,這種設計思想的優點是符合人們先抽象后具體,先整體后局部的思維習慣.其設計出的模塊修改方便,不影響其它模塊,且可重復使用,利用率高.本文僅就原理圖中的I12計數器模塊和I11延遲模塊進行討論.
計數器模塊的VHDL程序設計如下:
entity counter is
port(clk: in std logic;
Q : out std logic vector(7 downto 0);
ca out std_logic);
end counter;
architecture a_counter of counter is
signal Qs: std_logic_vector(7 downto 0);
signal reset: std_logic;
signal caolock: std_logic;
begin
process(clk,reset)
begin
if(reset=‘1)then
Qs=“00000000”;
elsif clkevent and clk=‘1 then
Qs=Qs+‘1;
end if;
end process;
reset=‘1 when Qs=255 else
‘0;
caolock=‘1 when Qs=0 else
‘0;
Q=Qs;
cao=resetorcaolock;
end a_counter;
在原理圖中,延遲模塊必不可少,其功能是對PWM波形的上升沿進行延時,而不影響下降沿,從而確保橋路同側不會發生短路.其模塊的VHDL程序如下:
entity delay is
port(clk: in std_logic;
input: in std_logic_vector(1 downto 0);
output:out std_logic_vector(1 downto 0)
end delay;
architecture a_delay of delay is
signal Q1,Q2,Q3,Q4: std_logic;
begin
process(clk)
begin
if clkevent and clk=‘1 then
Q3=Q2;
Q2=Q1;
Q1=input(1);
end if;
end process;
Q4=not Q3;
output(1)=input(1)and Q3;
output(0)=input(0)and Q4;
end a_delay;
采用可編程邏輯器件和硬件描述語言,同時利用其供應商提供的開發工具可大大縮短數字系統的設計時間,節約新產品的開發成本,另外,還具有設計靈活,集成度高,可靠性好,抗干能力強等特點.本文設計的PWM控制電路用于某光測設備的傳動裝置時,取得了良好的效果.












評論