采用無線傳感器網絡設計的滑坡監測系統技術

引 言
由于地質災害發生的偶然性,以及三峽庫區部分地區惡劣的地形環境等因素,傳統的人工監測方式無法有效把災害防患于未然。因此,建立實時的自動化監測預警系統是必然的發展趨勢。
目前在巫山縣多個滑坡地帶的實時監測系統中,普遍采用基于鉆孔傾斜儀深部位移監測、GPS表變形監測。傳感器和儀器設備檢測的信號,目前都采用線纜或者GPRS通信的方式匯集到中心計算機上,采用線纜的方式有明顯的弊端,除了在危險地帶不易布線,施工接續困難外,還易被人為破壞,容易受到自然災害的破壞性影響。采用GPRS通信的方式也有其技術上的局限性,并且在庫區一些偏遠地區和山區,信號較弱,甚至收索不到信號,因而無法建立有效的GPRS自動監測網絡。
采用無線傳感器網絡(WSN)技術實現庫區特殊地段地質災害的實時監測應該是一種技術上先進,適宜庫區地貌特征的有效嘗試。由于WSN本身的冗余性、無線性、網絡的自組織性,而具有較強的抗破壞能力,因而可以在基礎通信設施可能被毀壞的情況下,完成一定的通信任務。因此,把無線傳感器網絡技術應用到長江三峽庫區特殊地帶的滑坡災害監測預警中,利用各種傳感器實時采集信息,通過無線的方式將信息傳輸給控制中心,能夠解決布設有線監測系統的缺陷,而且適用于GMS網絡信號無法覆蓋的偏遠山區滑坡災害監測。
1 適合于滑坡監測無線傳感器網絡系統設計
1.1 監測預警系統的總體結構
在大范圍監控、預警的基礎上,以局域網為研究平臺,主要致力于數據采集和發送的有效性及處理上的精確性,監測預警系統的總體結構如圖1所示,可分為2個部分:上層的監控中心和下層的監控基站。監控基站和監控中心通過以太網連接起來,此外管理人員也可以通過自定義網絡訪問監控基站。監控基站和眾多的無線傳感器節點一起組成無線傳感器網絡。無線傳感器網絡具有很好的擴展性,隨意地增減節點,對網絡的拓撲結構和組網模式無太大影響,因而可以方便地根據實際情況增加或減少監控節點的數量。
1.2 適用于滑坡監測的無線傳感器網絡設計
這種無線傳感器網絡由眾多具有感知和路由功能的無線傳感器節點組成,能夠協作實時監測,感知并采集各種環境對象的信息,將其通過多跳轉發傳送回主機進行分析、處理。以這些工作節點為依托,通過無線通信組成網絡拓撲結構。
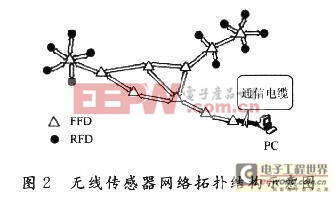
系統中大部分的節點為子節點,從組網通信上看,他們只是其功能的一個子集,稱為RFD(精簡功能設備),這種設備不具有路由功能;另外還有一些節點負責與控制子節點通信、匯集數據和發布控制,或起到通信路由的作用,稱為FFD(全功能設備或協調器)。如圖2所示為一個典型的遠程數據采集并返回到計算機終端的應用。每個節點由一個MCU作為主控設備。通過傾角傳感器可以監測滑坡的運動狀況,通過液位傳感器監測地下水位深度,數據采集間隔也可以由中心服務器靈活控制,在旱季可以調整為每24 h采集并傳遞1次數據,從而節省能量并避免大量的冗余數據。而在雨季危險期,其采集間隔可以密集到5 min/次,從而保證實時監測預警功能。每個信號采集節點通過ADC從模擬傳感器得到實時數據,按照ZigBee協議把數據打包,并通過射頻芯片及前端天線發送給簇內的RFD;經過RFD預處理之后,再由RFD路由轉發到遠端計算機;結合地貌特點、滑坡的分布特點,多個水流量檢測點之間的相互關系等多種地質學、水流動力學等方面的知識進行數據的融合和處理。在每個節點的外部可外接相應的。PIO芯片和其他外圍電路進行交互。
2.1 應用背景
清泉路滑坡為袁家蹬潛在滑坡的組成部分(見圖3),位于袁家蹬潛在滑坡的前部,滑坡段北部位于長江左岸大溪溝右岸、東北部位于長江左岸河漫灘。清泉路滑坡外形似梨形,坐落在長江第一、二級階地上;袁家蹬潛在滑坡體(包括清泉路滑坡)形似腎形,坐落在長江第一至第三級階地上,西側與長堰塘滑坡相鄰。由于滑坡為大型松散堆積層滑坡,三峽水庫正常蓄水運行后,滑坡前緣大部分將被水淹沒,清泉路滑坡80%位于庫區水位變動帶,局部及整體失穩的可能性大。從滑坡變形機制可以推斷清泉路滑坡為兩滑動的松散土體滑坡,具有兩級滑動面(見圖4)。滑坡預警的確定是監測滑坡的重要內容,也為治理滑坡提供了數據分析。
由于監測信息的實時采集、傳輸和處理均與節點密不可分,所以著重介紹節點的軟硬件設計。、
2.2.1 無線收發單元
采用SRWF-501-50型微功率無線數傳模塊,該無線通信模塊具有很強的抗干擾能力,全透明傳輸,體積小,傳輸距離遠,低功耗及休眠功能。
2.2.2 MCU控制單元(AT89C52)
數據處理模塊是傳感器網絡節點的核心部分,一方面接收來自傳感器的測量數據,按要求對數據進行處理和計算等,交給通信模塊發送;另一方面讀取通信模塊送入的數據信息,對硬件平臺其他模塊的操作進行控制。
2.2.3 數據采集模塊
傳感器采用傾角傳感器和液位傳感器,每個孔洞都會在最下端部署一個液位傳感器,在不同深度部署數個傾角傳感器,通過傾角傳感器可以監測山體的運動狀況,液位傳感器采集地下水位深度的數據,圖5給出無線傳感器節點電路構成框圖。
處理器模塊的CPU采用三星公司的基于ARM7的S3C4480微控制器,在ARM中移植了μCOS-Ⅱ實時多任務操作系統,以進行實時多任務管理。對于共享同一種資源會存在資源競爭的問題,系統中采用了事件標志和信號量的方法來實現同步機制,使得原子操作不需要關掉所有的中斷,從而不會造成系統的響應延遲。
按照硬件電路設計思路,軟件采用模塊化結構程序設計方式。軟件模塊包括:系統初始化、數據發送模塊、接收中斷服務、突發中斷采集、A/D采集模塊、UART串口模塊。系統初始化基本思路:上電后設置串口方式3,開啟定時中斷和外部中斷,啟動接收模塊,進行通信檢測,進入省電模式。這里簡單給出主程序流程圖(見圖6),中斷流程圖(見圖7),圖7中中斷為接收中斷,中斷1為突發中斷。
無線傳感器網絡被認為是影響人類未來生活的重要技術之一,這一新興技術結合了現有的多種先進技術,為人們提供了一種全新的獲取信息、處理信息的途徑。基于無線傳感器技術和地面監測點組網,基本建立了研究三峽庫區特殊地段滑坡監測系統,通過使用證實了整個系統的可行性。對系統稍加修改便可以應用在水質污染、森林火災等自然災害監測中,還可以應用在室內防盜、智能交通、工業監控等領域。












評論