無傳感器的直流無刷電機控制器ML4435及其應用

當電源首先加到ML4435時,電機處于靜止,故反電勢等于零。電機需要轉動,以使反電勢取樣器自動跟蹤電機位置,并使電機換向。ML4435用最低的VCO頻率開始使電機換向。該低頻換向由RVCO上的0?2V箝位設定,這就提供一為fmax/30的換向頻率。
2.15 轉動狀態
在反電勢傳感后,PLL自動跟蹤電機位置,電機則按閉合環路控制轉動。在這一點上,速度控制環應迫使電機速度相應于SPEEDSET電壓設置的速度。
2.16 PWM速度控制
速度控制是由在SPEEDSET(5腳)設置的速度指令來完成的,該腳輸入電壓為0.2~6V。速度指令的精度由外部元件RVCO和CVCO確定。控制ML4435的速度指令有幾種方法:其一是用一電位器接在RT與地之間,而將滑動觸頭接在SPEEDSET。若用微處理器控制5腳,則可用RT作數模轉換器(DAC)輸入基準。RT電壓應經緩沖器接外部電路。經跨導誤差放大器,速度指令與比SPEEDFB(18腳)低0?7V的傳感速度相比較。速度誤差放大器的輸出端是SPEEDCOMP(3腳),它被箝位在8.2~2.2V之間。8?2V信號與全PWM占空比相對應,而2?2V則對應0%占空比。速度環路補償元件接該腳,見圖13。可用下式來計算補償元件:
CSC2=![]()
RSC=![]()
CSC1=10×CSC2
式中:freq是速度環路的帶寬(Hz)。
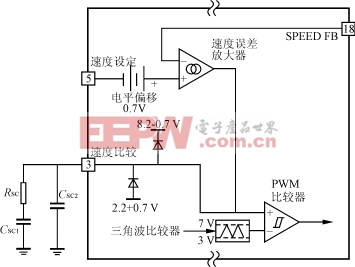
圖13 PWM振 蕩 器 電 路
圖13中3腳電壓與三角波振蕩器比較,產生一PWM占空比。PWM振蕩器產生一個3~7V的三角波函數,而三角波振蕩器頻率由RT(6腳)的接地電阻設定。RT可由圖14曲線來選擇。來自速度控制環的PWM占空比,選通逐個脈沖式電流限制電路,以控制輸出驅動器LA、LB、LC。
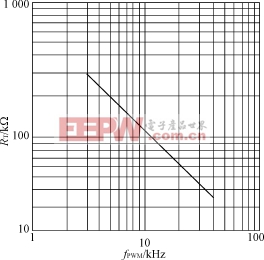
圖 14 RT與 PWM頻 率 的 相 應 關 系 曲 線
2.17 慣性跟蹤
當CVCO(20腳)被拉低到1?5V時,6路輸出驅動器均關斷。慣性跟蹤COAST功能切斷所有的電源使電機隨慣性至停止。20腳的慣性跟蹤功能見圖15,它可由一只接地開關或由圖15中20腳的接地的開路集電極接地的開關管來驅動。
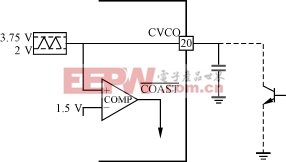
圖 15 慣 性 跟 蹤 控 制
2.18 欠壓保護
欠壓保護用于保護低VCC狀況下的三相功率級。欠壓保護是在 VCC=9.2V或更低時被啟動。欠壓保護也關斷全部輸出驅動器LA、LB、LC和HA、HB、HC。啟動過電壓的比較器具有500mV的滯后。
2.19 輸出驅動器到三相橋功率級的接口電路
大多數靈活的電路結構,是采用高邊驅動器來控制N溝道MOSFET或IGBT,它允許的應用范圍是12~170V。
3 的典型應用電路
圖16給出了典型應用中的ML4435及所有支持電路,圖17則給出了采用IR公司的IR2118作高邊驅動器的功率級電路和高壓MOSFET。
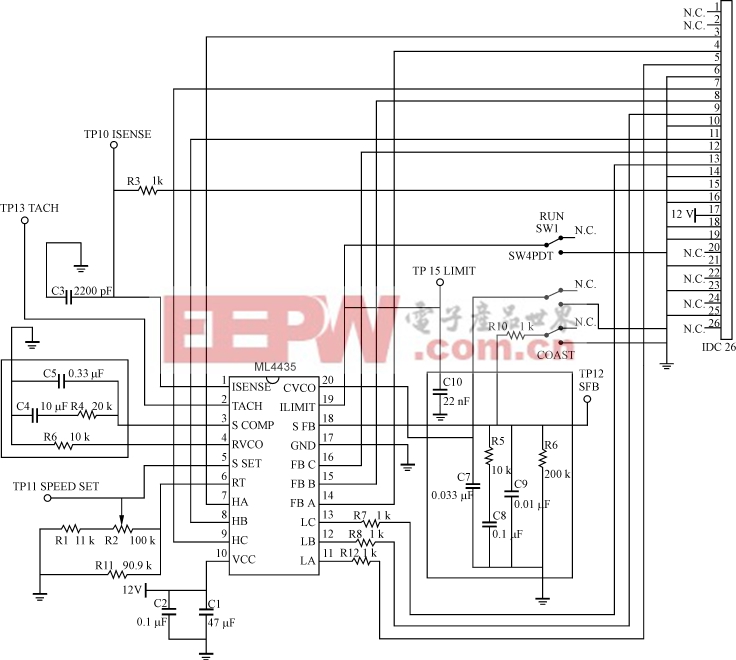
圖16 ML4435的典型外圍應用電路(原圖,未做標準化處理)
圖17 ML4435的外部功率級電路(原圖,未做標準化處理)

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理








評論